Мастеровым от мастерового.: Определение типа асинхронного двигателя
Прежде чем подключить асинхронный двигатель к сети, необходимо определить, какой тип двигателя находится перед нами. Так как каждый из них требует разного подключения.
Среди распространенных двигателей можно выделить три основные группы. Это трёхфазные – они наиболее распространены. Затем идут однофазные, с конденсаторной обмоткой, или просто конденсаторные. И наименее распространены – однофазные с пусковой обмоткой, или как их ещё называют – с бифилярной обмоткой. Касаться двухскоростных и других редких модификаций я в данной статье не буду.
Так как шильдики на двигателях могут быть повреждены, или
вовсе отсутствовать. А иногда двигатель может быть перемотан с пересчётом на
другой тип, то ориентироваться на табличку можно только при условии, что
двигатель новый.
Для того, чтоб определить тип двигателя, нам понадобится омметр способный замерять от единиц сопротивления и выше.
Открываем борно двигателя и убираем все перемычки между проводами, а также, разъединяем все соединения.
Замеряя сопротивление между проводами, находим «прозванивающиеся» пары и записываем сопротивление между ними.
Трёхфазный двигатель имеет три одинаковых обмотки. Поэтому он будет иметь три пары проводов с одинаковым сопротивлением или три провода, сопротивление между которыми будет одинаково в любой последовательности. Различия между этими вариантами в том, что двигатель с тремя выводами уже соединён звездой и мы не сможем соединить его треугольником без разборки и выведения дополнительных проводов. Если же в двигателе шесть выводов, то мы сможем применить любую схему подключения.
Однофазные двигатели обычно имеют две разные обмотки (в редких случаях две обмотки одинаковы).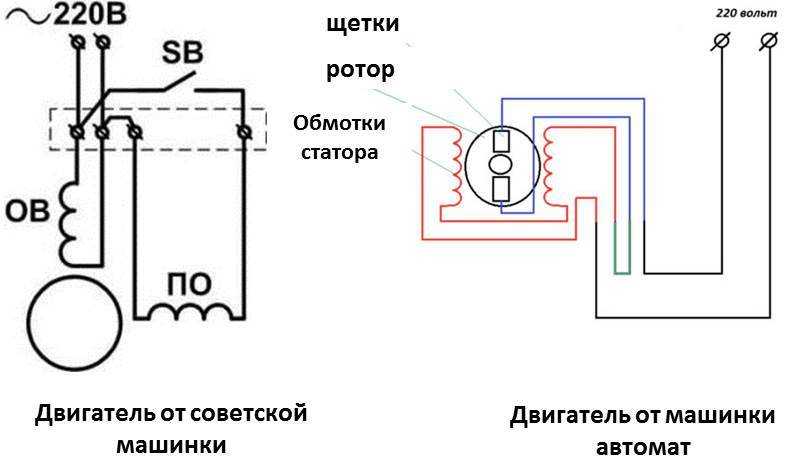 Поэтому будут иметь две пары проводов с разным сопротивлением.
Либо три провода с разным сопротивлением между ними. Причём, два меньших
сопротивления в сумме будут равны большему. Разница между двигателями с тремя и
четырьмя проводами в том, что двигатель с тремя проводами мы сможем «запустить»
только в одну сторону, а с четырьмя, и по часовой стрелке, и против.
Поэтому будут иметь две пары проводов с разным сопротивлением.
Либо три провода с разным сопротивлением между ними. Причём, два меньших
сопротивления в сумме будут равны большему. Разница между двигателями с тремя и
четырьмя проводами в том, что двигатель с тремя проводами мы сможем «запустить»
только в одну сторону, а с четырьмя, и по часовой стрелке, и против.Если сопротивление обмоток отличается не больше чем в 2 раза, то это двигатель, скорее всего, конденсаторный. Если больше чем в 2 раза, то с пусковой обмоткой. Более точно можно определить опытным путём.
P.S. При «прозвонке» проводов, нужно учитывать, что из двигателя могут выходить дополнительные провода от термодатчиков, «корпус» двигателя, центробежные выключатели и др.
Николай Москаленко
По принципам устройства однофазные асинхронные двигатели разделяются на следующие основные типы:
1) двигатели с пусковой обмоткой
2) двигатели с встроенным сопротивлением (бифилярная обмотка)
3) конденсаторные двигатели
4) двигатели с короткозамкнутым витком на полюсе
Яркий представитель первого типа находится справа (АД-180). Пусковая обмотка занимает 1/3 пазов статора, имеет малое кол-во витков и, следовательно, малое индуктивное сопротивление.
Пусковая обмотка занимает 1/3 пазов статора, имеет малое кол-во витков и, следовательно, малое индуктивное сопротивление.
К второму типу относятся двигатели АОЛБ -32-2, с бифилярной обмоткой (например, мотается катушка из 75 витков из которых 25 разворачиваются на 180 градусов) — охватывает диапазон от 18 до 600 Вт.
К третьему типу двигателе надо отнести двигатели АОЛГ и АОЛД — конденсаторные и с пусковым конденсатором. они были заменены новой серией АВ (трехфазный) или АВЕ (однофазный, второй справа).
Как подключить шаговый двигатель с 4, 6, 8 выводами
Новости
График работы 8 марта 2023 года
Уважаемые покупательницы и покупатели! Поздравляем с наступающим праздником — Международным женским днем 8 Марта! 7 марта — рабочий день с 8.00 до 15.30. 8 марта — выходной день.
График работы 23 и 24 февраля 2023 года
Уважаемые покупатели! Обращаем ваше внимание, что 22 февраля рабочий день с 8. 00 до 15.30, 23, 24, 25, 26 февраля — выходные дни.
График работы 30 января 2023 г.
Уважаемые покупатели!
В связи с профилактическими работами в понедельник 30 января мы работаем с 12.00.
Благодарим за понимание. Читать все новости
00 до 15.30, 23, 24, 25, 26 февраля — выходные дни.
График работы 30 января 2023 г.
Уважаемые покупатели!
В связи с профилактическими работами в понедельник 30 января мы работаем с 12.00.
Благодарим за понимание. Читать все новости
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.
В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером.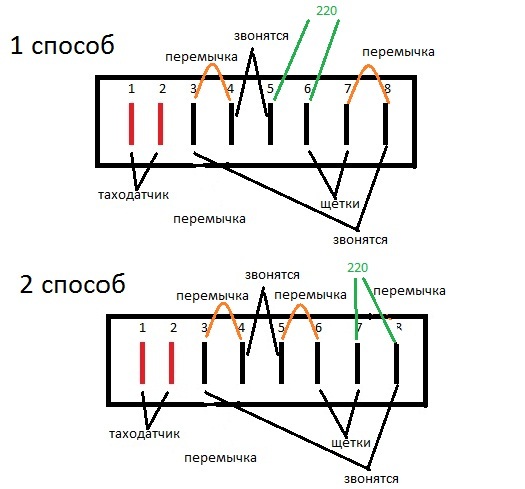 Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Также, как и шаговый двигатель с четырехконтактным соединением, униполярный двигатель с 6 проводами имеет пару проводов для каждой обмотки. Однако, он также имеет центральный вывод для каждой обмотки, что дает возможность подключать его как в качестве биполярного шагового двигателя, так и в качестве однополярного.
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Схема подключения шагового электродвигателя с 5-ю выводами очень похожа на схему подключения с 6-ю контактами. Главное ее отличие состоит в том, что центральные выводы замкнуты между собой внутри, соединяясь в один провод. Это обеспечивает работу электродвигателя только по однополярной схеме.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 8 ВЫВОДАМИ
Наконец, существуют шаговые электродвигатели, подключаемые при помощи 8-ми проводов. Для того, чтобы понять, как подключить шаговый двигатель с 8 выводами, мы должны вернуться к инструкциям выше.Их схема подключения во многом схожа со схемой, предполагающей использование 6-ти проводов. Разница между ними состоит в том, что две фазы разделены на две отдельных обмотки. Имея указанную схему, вы сможете подключить шаговый двигатель по однополярной схеме, а также иметь три различные комбинации для биполярного подключения.
Для того, чтобы понять, как подключить шаговый двигатель с 8 выводами, мы должны вернуться к инструкциям выше.Их схема подключения во многом схожа со схемой, предполагающей использование 6-ти проводов. Разница между ними состоит в том, что две фазы разделены на две отдельных обмотки. Имея указанную схему, вы сможете подключить шаговый двигатель по однополярной схеме, а также иметь три различные комбинации для биполярного подключения.
- Последовательно соединив обмотки(увеличится индуктивное и активное сопротивление, а также момент, упадет максимальная скорость)
- Параллельно (из-за меньшей индуктивности будет меньше момент и выше скорость)
- Соединив обмотки параллельно, можно использовать униполярное подключение, как для 6-выводного шагового мотора
Ссылки:
Как настроить ЧПУ станок
Униполярный и биполярный шаговый двигатель
DARXTON
Новости
График работы 8 марта 2023 года
Уважаемые покупательницы и покупатели! Поздравляем с наступающим праздником — Международным женским днем 8 Марта! 7 марта — рабочий день с 8.
Управление трехфазным асинхронным двигателем с помощью частотно-регулируемого привода и ПЛК
— Реклама —
Различные процессы автоматизации в промышленности требуют управления асинхронными двигателями переменного тока с помощью приводов переменного тока. Здесь представлена надежная система включения/выключения, изменения скорости и направления вращения промышленного трехфазного асинхронного двигателя с использованием ЧРП и ПЛК. Мы используем здесь двигатель переменного тока Delta для его работы.
Простая панель управления подключается с помощью ПЛК Allen Bradley для демонстрации. Также может быть разработана расширенная SCADA Intouch Wonderware.
Также может быть разработана расширенная SCADA Intouch Wonderware.
Электродвигатель — это электромеханическое устройство, преобразующее электрическую энергию в механическую. В случае работы от трехфазного переменного тока наиболее широко используемым двигателем является трехфазный асинхронный двигатель, поскольку этот тип двигателя не требует какого-либо пускового устройства, поскольку он является самозапускающимся двигателем.
Рис. 1: Схема всей системыРис. 2: Блок-схема дискаКакие диски бывают
— Реклама —
Часто в промышленности возникает необходимость управления скоростью трехфазного асинхронного двигателя. Приводы переменного тока Delta способны эффективно управлять скоростью двигателя, улучшать автоматизацию машин и экономить энергию. Каждый привод серии частотно-регулируемых приводов (VFD) предназначен для удовлетворения конкретных потребностей применения.
Преобразователи частоты переменного тока точно контролируют крутящий момент, плавно справляются с повышенной нагрузкой и обеспечивают множество настраиваемых режимов управления и настройки.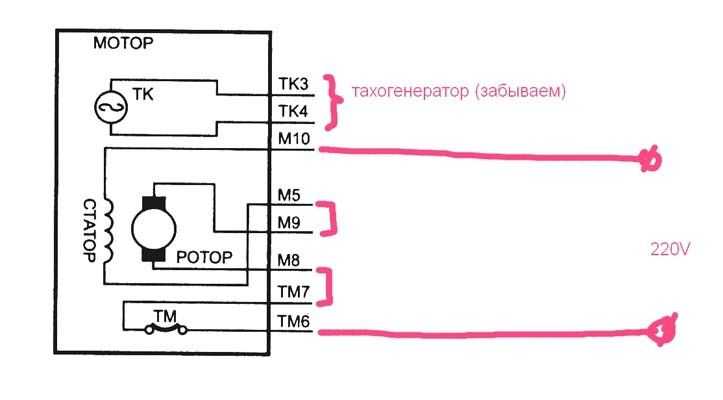 ЧРП можно использовать для изменения скорости, направления и других параметров трехфазного двигателя. Мы используем 2-проводной метод для управления скоростью и направлением двигателя.
ЧРП можно использовать для изменения скорости, направления и других параметров трехфазного двигателя. Мы используем 2-проводной метод для управления скоростью и направлением двигателя.
Работа частотно-регулируемого привода
Первая ступень частотно-регулируемого привода представляет собой преобразователь, состоящий из шести диодов, которые аналогичны обратным клапанам, используемым в водопроводных системах. Они позволяют току течь только в одном направлении; направление, указанное стрелкой на символе диода. Например, всякий раз, когда напряжение фазы A (напряжение аналогично давлению в водопроводных системах) более положительное, чем напряжение фазы B или C, этот диод открывается и пропускает ток.
Когда фаза B становится более положительной, чем фаза A, диод фазы B открывается, а диод фазы A закрывается. То же самое верно для трех диодов на отрицательной стороне шины. Таким образом, мы получаем шесть импульсов тока при открытии и закрытии каждого диода. Это называется 6-импульсным частотно-регулируемым приводом, который является стандартной конфигурацией для современных частотно-регулируемых приводов.
Мы можем избавиться от пульсаций переменного тока на шине постоянного тока, добавив конденсатор. Конденсатор работает аналогично резервуару или аккумулятору в водопроводной системе. Он поглощает пульсации переменного тока и выдает плавное постоянное напряжение.
Преобразователь диодного моста, который преобразует переменный ток в постоянный, иногда называют просто преобразователем. Преобразователь, который преобразует постоянный ток обратно в переменный, также является преобразователем, но, чтобы отличить его от диодного преобразователя, его обычно называют инвертором. В отрасли стало обычным называть любой преобразователь постоянного тока в переменный инвертором.
Когда мы замыкаем один из верхних переключателей инвертора, эта фаза двигателя подключается к положительной шине постоянного тока, и напряжение на этой фазе становится положительным. Когда мы замыкаем один из нижних переключателей в преобразователе, эта фаза подключается к отрицательной шине постоянного тока и становится отрицательной.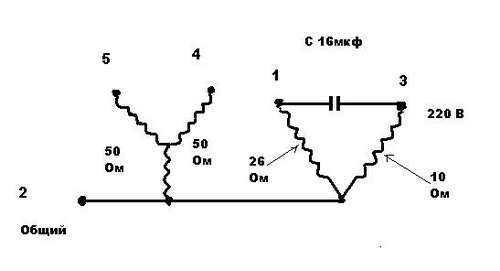 Таким образом, мы можем сделать любую фазу на двигателе положительной или отрицательной по желанию и, таким образом, можем генерировать любую частоту, которую захотим. Таким образом, мы можем сделать любую фазу положительной, отрицательной или нулевой.
Таким образом, мы можем сделать любую фазу на двигателе положительной или отрицательной по желанию и, таким образом, можем генерировать любую частоту, которую захотим. Таким образом, мы можем сделать любую фазу положительной, отрицательной или нулевой.
Обратите внимание, что выходной сигнал частотно-регулируемого привода имеет прямоугольную форму. ЧРП не производят синусоидальный выходной сигнал. Эта прямоугольная форма волны не подходит для распределительной системы общего назначения, но вполне подходит для двигателя.
Если мы хотим снизить частоту двигателя, мы просто медленнее переключаем выходные транзисторы инвертора. Но если мы уменьшаем частоту, мы также должны уменьшать напряжение, чтобы сохранить отношение В/Гц. Широтно-импульсная модуляция (ШИМ) делает это.
Представьте себе, что мы можем контролировать давление в водопроводе, включая и выключая клапан на высокой скорости.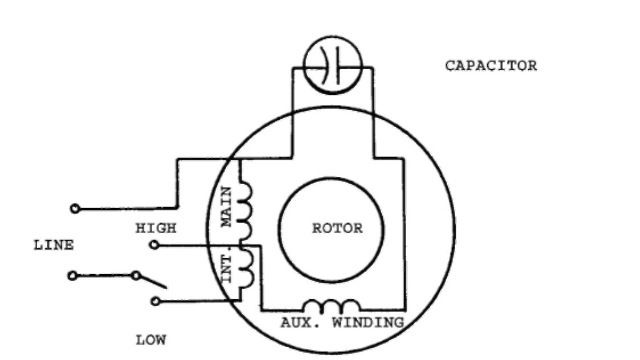 Хотя это было бы непрактично для сантехнических систем, это очень хорошо работает для частотно-регулируемых приводов.
Хотя это было бы непрактично для сантехнических систем, это очень хорошо работает для частотно-регулируемых приводов.
Обратите внимание, что в течение первого полупериода напряжение присутствует в половине случаев, а остальное время отсутствует. Таким образом, среднее напряжение составляет половину от 480В, то есть 240В. Импульсируя выход, мы можем добиться любого среднего напряжения на выходе ЧРП.
Выбор Delta VFD-M в качестве привода переменного тока
Рис. 5: Delta VFD-MDelta VFD-M — векторный микропривод переменного тока без датчиков. Его компактная конструкция идеально подходит для малой и средней мощности. Привод M предназначен для обеспечения сверхмалошумной работы и включает в себя несколько инновационных технологий, уменьшающих помехи.
Этот привод может иметь множество применений, таких как упаковочная машина, машина для производства клецок, беговая дорожка, вентилятор с контролем температуры/влажности для сельского хозяйства и аквакультуры, миксер для пищевой промышленности, шлифовальный станок, сверлильный станок, малогабаритный гидравлический токарный станок, элеватор, оборудование для нанесения покрытий.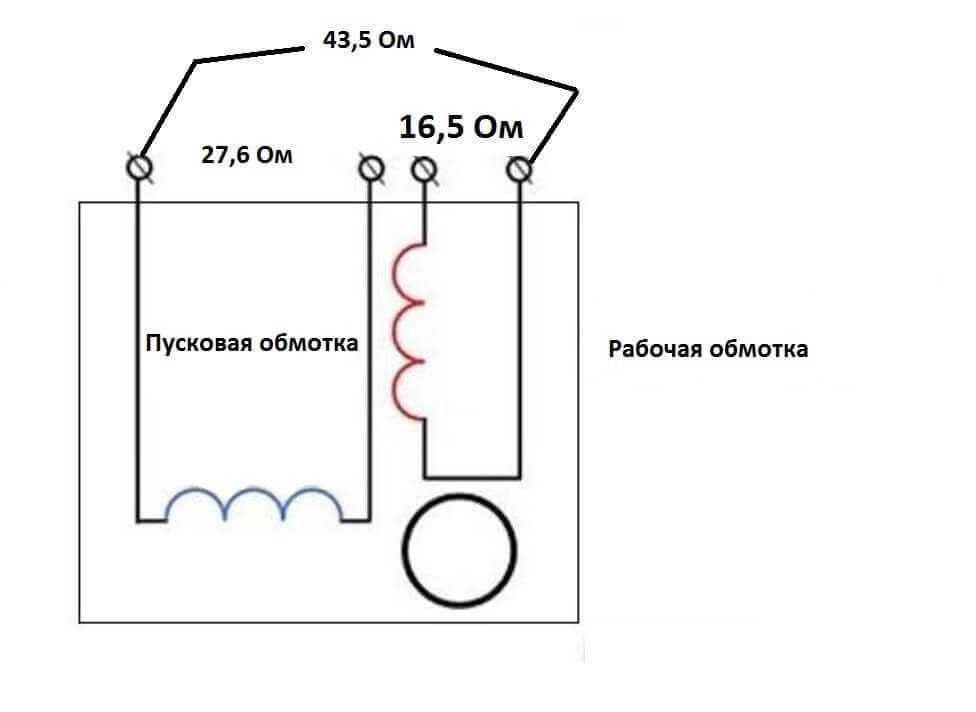 , малогабаритный фрезерный станок, робот-манипулятор литьевой машины (зажим), деревообрабатывающий станок (двусторонний деревообрабатывающий станок), кромкогибочный станок, эластификатор и т.д.
, малогабаритный фрезерный станок, робот-манипулятор литьевой машины (зажим), деревообрабатывающий станок (двусторонний деревообрабатывающий станок), кромкогибочный станок, эластификатор и т.д.
Шаги для полного управления двигателем
- Проверьте соединения L1, L2, L3; T1, T2, T3 (используются для подачи 3-фазного входа на VFD и подключения к нему двигателя) и провода, выходящие из M0, M1 и GND.
- Включите трехфазное питание.
- Для программирования VFD-M:
(i) Нажмите Mode
(ii) На F60.0 нажмите Enter
(iii) Нажмите Mode
(iv) Выберите соответствующий параметр, используя клавиши Up/Down на клавиатуре.
(v) Например, для Pr0 выберите P 00.
(vi) Согласно инструкции установите параметры для требуемого режима работы
(vii) Нажмите EnterEnd
Примечание: В любой момент нажмите Mode, чтобы перейти к предыдущему шагу.
Для двигателя, работающего от внешнего управления, у нас есть три режима работы; два 2-проводных метода и один 3-проводной метод. Помимо этого, существует метод по умолчанию, которым можно управлять с цифровой клавиатуры.
Сначала выполните пробный запуск, чтобы проверить все соединения.
Пробный запуск ЧРП
Заводская установка источника управления с цифровой клавиатуры (Pr.01=00). Вы можете выполнить пробный запуск, используя цифровую клавиатуру, выполнив следующие действия:
- После подачи питания убедитесь, что на дисплее отображается F60.0Hz. Когда привод переменного тока находится в режиме ожидания, загораются светодиоды STOP и FWD.
- Нажмите клавишу вниз, чтобы установить частоту на 5 Гц.
- Нажмите кнопку запуска. Светодиод RUN и светодиод FWD загорятся, указывая на то, что рабочая команда запущена в прямом направлении. И если вы хотите перейти на обратный ход, вы должны нажать кнопку вниз. А если вы хотите замедлиться до остановки, нажмите кнопку стоп/сброс.


Программирование VFD-M
Имеется два контакта, M0 и M1. Всякий раз, когда M0 замыкается, ЧРП переходит в рабочий режим. Если он открыт, двигатель не вращается. M1 определяет направление вращения. Если M1 открыт, он вращается в прямом направлении; если закрыто, в обратном направлении.
Параметры для вышеуказанного режима:
Параметр 00 установлен на 01 (для управления основной частотой с помощью потенциометра)
Параметр 01 установлен на 01 (внешнее управление через M0, M1)
Параметр 38 установлен на 01 ( M0, M1 устанавливаются как пуск/стоп и вперед/назад)
Установите параметр 00 на 00 для управления основной частотой с помощью цифровой клавиатуры и на 01 для управления с помощью потенциометра, подключенного, как показано на схеме подключения первого контакта.
Параметр 38 должен быть установлен на 01, как показано на диаграмме выше.
После того, как все эти параметры установлены, выполните шаги по эксплуатации двухпроводного режима для запуска двигателя.
Программируемые логические контроллеры (ПЛК) очень эффективно поддерживают цифровой ввод/вывод. Таким образом, ПЛК также можно использовать для управления работой частотно-регулируемого привода и, следовательно, для управления подключенным трехфазным асинхронным двигателем.
Рис. 11: Подключение ПЛК Allen BradleyПЛК Allen Bradley MicroLogix 1000 подключается к Delta VFD-M и программируется с помощью релейной логики с использованием RS Logix.
Мы подключили M0 и M1 к O2 и O3 (выходам) ПЛК и управляли O2 и O3 с помощью лестничной логики. На рис. 4 показана логика, определенная для режима 01, то есть Pr.38 = 01. O:0.0/2 подключен к M0.
Рис. 12: Изменение скорости асинхронного двигателя с помощью потенциометра При установке I:0. 0/2 двигатель переходит в рабочий режим. Теперь, даже если I:0.0/2 выключен, O:0.0/2 остается включенным благодаря определенной логике. Его можно остановить только повторным нажатием I:0.0/2.
0/2 двигатель переходит в рабочий режим. Теперь, даже если I:0.0/2 выключен, O:0.0/2 остается включенным благодаря определенной логике. Его можно остановить только повторным нажатием I:0.0/2.
I:0.0/3 управляет O:0.0/5, который, в свою очередь, подключен к M1, который определяет направление вращения двигателя.
Рис. 13: Трехфазный асинхронный двигатель0:0.0/3 — это светодиод, который загорается, когда двигатель находится в рабочем режиме.
0:0.0/5 — это светодиод, который загорается, когда двигатель работает в прямом направлении, и гаснет при обратном вращении.
Любите читать эту статью? Вам также может понравиться Создание системы управления ПК с использованием Wonderware InTouch SCADA и ПЛК Allen BradleyДжоби Энтони — магистр компьютерных технологий из США, в настоящее время работает инженером F в Межуниверситетском ядерном ускорительном центре (IUAC). ), Нью-Дели. Он также был приглашенным ученым в ЦЕРНе, Женева
Акшай Кумар — студент бакалавриата технических наук в Делийском технологическом университете, Нью-Дели, в настоящее время проходит стажировку в IUAC
Эта статья была впервые опубликована 22 июля 2016 г.
 и недавно обновлена 27 декабря 2018 г.
и недавно обновлена 27 декабря 2018 г.3 Схема регулятора скорости фазного асинхронного двигателя
В этом посте мы обсуждаем создание простой схемы регулятора скорости 3-фазного асинхронного двигателя, которую также можно применять для однофазного асинхронного двигателя или буквально для любого типа двигателя переменного тока.
Когда дело доходит до управления скоростью асинхронных двигателей, обычно используются матричные преобразователи, включающие множество сложных каскадов, таких как LC-фильтры, двунаправленные массивы переключателей (с использованием IGBT) и т. д.
Все они используются для достижения конечного результата. прерванный сигнал переменного тока, рабочий цикл которого можно регулировать с помощью сложной схемы микроконтроллера, что, наконец, обеспечивает требуемое управление скоростью двигателя.
Однако мы можем поэкспериментировать и попытаться реализовать управление скоростью 3-фазного асинхронного двигателя с помощью гораздо более простой концепции, используя усовершенствованные микросхемы оптопары детектора пересечения нуля, силовой симистор и схему ШИМ.
Благодаря серии оптопар MOC, которые сделали схемы управления симисторами чрезвычайно безопасными и простыми в настройке, а также позволяют легко интегрировать ШИМ для предполагаемых элементов управления.
В одном из моих предыдущих постов я обсуждал простую схему контроллера плавного пуска двигателя с ШИМ, в которой реализована микросхема MOC3063 для обеспечения эффективного плавного пуска подключенного двигателя.
Здесь мы также используем идентичный метод для реализации предлагаемой схемы трехфазного регулятора скорости асинхронного двигателя. На следующем рисунке показано, как это можно сделать:
На рисунке мы видим три идентичных каскада оптопары MOC, сконфигурированных в стандартном режиме симисторного регулятора, а входная сторона интегрирована с простой схемой ШИМ IC 555.
3 цепи MOC сконфигурированы для работы с 3-фазным входом переменного тока и подачи его на подключенный асинхронный двигатель.
Вход ШИМ на изолированной стороне управления светодиодами оптопары определяет коэффициент прерывания трехфазного входа переменного тока, который обрабатывается MOC ICS.
Использование ШИМ-контроллера IC 555 (переключение при нулевом напряжении)
Это означает, что путем регулировки ШИМ-потенциометра, связанного с 555 IC, можно эффективно управлять скоростью асинхронного двигателя.
Выходной сигнал на выводе №3 имеет переменный рабочий цикл, который, в свою очередь, соответствующим образом переключает выходные симисторы, что приводит либо к увеличению среднеквадратичного значения переменного тока, либо к его уменьшению.
Увеличение среднеквадратичного значения с помощью более широких ШИМ позволяет получить более высокую скорость двигателя, в то время как уменьшение среднеквадратичного значения переменного тока с помощью более узких ШИМ дает противоположный эффект, т. е. вызывает пропорциональное замедление двигателя.
Вышеуказанные функции реализованы с большой точностью и безопасностью, поскольку ИС имеют множество внутренних сложных функций, специально предназначенных для управления симисторами и тяжелыми индуктивными нагрузками, такими как асинхронные двигатели, соленоиды, клапаны, контакторы, полупроводниковые реле и т.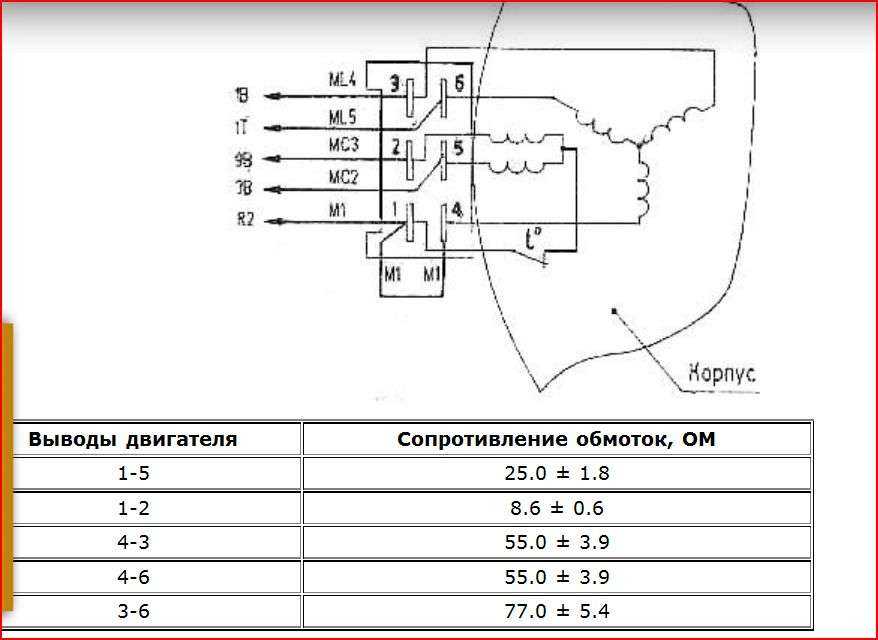 д.
д.
ИС также обеспечивает полностью изолированную работу каскада постоянного тока, что позволяет пользователю производить настройку, не опасаясь поражения электрическим током.
Этот принцип можно также эффективно использовать для управления скоростью однофазного двигателя, используя одну микросхему MOC вместо трех.
Конструкция на самом деле основана на теории привода симистора, пропорционального времени. Верхнюю схему ШИМ IC555 можно отрегулировать для получения рабочего цикла 50% на гораздо более высокой частоте, в то время как нижнюю схему ШИМ можно использовать для реализации операции управления скоростью асинхронного двигателя посредством регулировки соответствующего потенциометра.
Рекомендуется, чтобы эта IC 555 имела относительно более низкую частоту, чем верхняя схема IC 555. Это можно сделать, увеличив емкость конденсатора на выводе № 6/2 примерно до 100 нФ.
ПРИМЕЧАНИЕ: ДОБАВЛЕНИЕ ПОДХОДЯЩИХ ИНДУКТОРОВ ПОСЛЕДОВАТЕЛЬНО С ФАЗНЫМИ ПРОВОДАМИ МОЖЕТ ЗНАЧИТЕЛЬНО УЛУЧШИТЬ ХАРАКТЕРИСТИКИ РЕГУЛИРОВАНИЯ СКОРОСТИ СИСТЕМЫ.
Лист данных для MOC3061
Предполагаемая форма волны и управление фазой с использованием вышеуказанной концепции:
Вышеописанный метод управления трехфазным асинхронным двигателем на самом деле довольно груб, поскольку он не имеет управления В/Гц .
Он просто использует включение/выключение сети с разной скоростью для получения средней мощности двигателя и управления скоростью, изменяя этот средний переменный ток двигателя.
Представьте, что вы включаете/выключаете двигатель вручную 40 или 50 раз в минуту. Это приведет к тому, что ваш двигатель замедлится до некоторого относительного среднего значения, но будет двигаться непрерывно. Описанный выше принцип работает точно так же.
Более технический подход заключается в разработке схемы, которая обеспечивает надлежащий контроль соотношения В/Гц и автоматически регулирует его в зависимости от скорости скольжения или любых колебаний напряжения.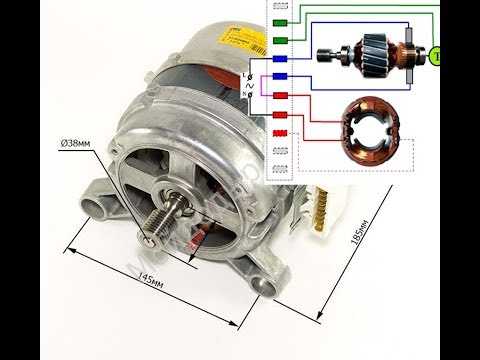
Для этого мы в основном используем следующие этапы:
- Цепь драйвера H-Bridge или Full Bridge IGBT
- 3-фазный каскад генератора для питания полной мостовой схемы
- В/Гц ШИМ-процессор
Использование схемы управления Full Bridge IGBT
приведенная выше схема на основе симистора выглядит пугающе для вас, можно попробовать следующее управление скоростью асинхронного двигателя с полным мостом на основе ШИМ:
В схеме, показанной на рисунке выше, используется однокристальный полномостовой драйвер IC IRS2330 (последняя версия — 6EDL04I06NT). который имеет все встроенные функции для обеспечения безопасной и идеальной работы трехфазного двигателя.
Микросхеме требуется только синхронизированный 3-фазный логический вход на ее выводах HIN/LIN для создания требуемого 3-фазного колебательного выхода, который, наконец, используется для работы полной мостовой сети IGBT и подключенного 3-фазного двигателя.
ШИМ-инжекция с управлением скоростью реализована через 3 отдельных полумостовых каскада драйверов NPN/PNP, управляемых с помощью подачи ШИМ от генератора ШИМ IC 555, как показано в наших предыдущих проектах. Этот уровень ШИМ может в конечном итоге использоваться для управления скоростью асинхронного двигателя.
Этот уровень ШИМ может в конечном итоге использоваться для управления скоростью асинхронного двигателя.
Прежде чем мы изучим фактический метод управления скоростью для асинхронного двигателя, давайте сначала поймем, как можно добиться автоматического управления V/Hz с помощью нескольких схем IC 555, как описано ниже
Схема автоматического процессора V/Hz PWM (Замкнутый контур)
В предыдущих разделах мы узнали о конструкциях, которые помогут асинхронному двигателю двигаться со скоростью, указанной производителем, но он не будет регулироваться в соответствии с постоянным соотношением В/Гц, если только не будет применена следующая ШИМ. процессор интегрирован с входным каналом H-Bridge PWM.
Приведенная выше схема представляет собой простой генератор ШИМ, использующий пару IC 555. IC1 генерирует частоту ШИМ, которая преобразуется в треугольные волны на выводе № 6 IC2 с помощью R4/C3.
Эти треугольные волны сравниваются с синусоидальной пульсацией на выводе № 5 микросхемы IC2. Эти выборочные пульсации получаются путем выпрямления трехфазной сети переменного тока в пульсации переменного тока 12 В и подаются на контакт № 5 микросхемы IC2 для необходимой обработки.
Эти выборочные пульсации получаются путем выпрямления трехфазной сети переменного тока в пульсации переменного тока 12 В и подаются на контакт № 5 микросхемы IC2 для необходимой обработки.
При сравнении двух сигналов на выводе №3 микросхемы IC2 генерируется ШИМ соответствующего размера, который становится управляющим ШИМ для сети H-моста.
Как работает схема V/Hz
При включении питания конденсатор на выводе № 5 начинает генерировать нулевое напряжение на выводе № 5, что приводит к наименьшему значению SPWM в схеме H-моста, что, в свою очередь, включает асинхронный двигатель для запуска с медленным постепенным плавным пуском.
По мере зарядки этого конденсатора потенциал на выводе № 5 возрастает, что пропорционально увеличивает SPWM и позволяет двигателю постепенно набирать скорость.
Мы также видим цепь обратной связи тахометра, которая также интегрирована с выводом № 5 микросхемы IC2.
Этот тахометр отслеживает скорость вращения ротора или скорость скольжения и генерирует дополнительное напряжение на выводе № 5 микросхемы IC2.
Теперь, когда скорость двигателя увеличивается, скорость скольжения пытается синхронизироваться с частотой статора и при этом начинает набирать скорость.
Это увеличение индукционного скольжения пропорционально увеличивает напряжение тахометра, что, в свою очередь, заставляет IC2 увеличивать выходной сигнал SPWM, а это, в свою очередь, еще больше увеличивает скорость двигателя.
Вышеупомянутая регулировка пытается поддерживать отношение В/Гц на довольно постоянном уровне до тех пор, пока, наконец, SPWM от IC2 не сможет больше увеличиваться.
В этот момент скорость скольжения и скорость статора становятся установившимися и поддерживаются до тех пор, пока входное напряжение или скорость скольжения (из-за нагрузки) не изменятся. В случае их изменения схема процессора В/Гц снова вступает в действие и начинает регулировать соотношение для поддержания оптимального отклика скорости асинхронного двигателя.
Тахометр
Схема тахометра также может быть дешево построена с использованием следующей простой схемы и объединена с описанными выше этапами схемы:
Как реализовать управление скоростью
В приведенных выше параграфах мы поняли процесс автоматического регулирования, который может быть достигнут путем интеграции обратной связи тахометра в схему контроллера авторегулирования SPWM.
Теперь давайте узнаем, как можно управлять скоростью асинхронного двигателя, изменяя частоту, что в конечном итоге заставит SPWM снижаться и поддерживать правильное соотношение В/Гц.
Следующая диаграмма поясняет этап регулирования скорости:
Здесь мы видим схему трехфазного генератора, использующую микросхему IC 4035, частота фазового сдвига которой может изменяться путем изменения тактового входа на выводе № 6.
3-фазные сигналы подаются на вентили 4049 IC для создания требуемых каналов HIN, LIN для сети драйверов полного моста.
Это означает, что, соответствующим образом изменяя тактовую частоту IC 4035, мы можем эффективно изменить рабочую трехфазную частоту асинхронного двигателя.
Это реализовано с помощью простой нестабильной схемы IC 555, которая подает регулируемую частоту на контакт № 6 IC 4035 и позволяет регулировать частоту с помощью подключенного потенциометра 100K. Конденсатор C необходимо рассчитать таким образом, чтобы регулируемый диапазон частот находился в пределах правильных характеристик подключенного асинхронного двигателя.