ФИЗИКА: Задачи на механическую мощность
Задачи на механическую мощность
с решениями
Формулы, используемые на уроках «Задачи на механическую мощность».
Название величины | Обозначение | Единица измерения | Формула |
Работа | A | Дж | A = Nt, |
Мощность | N | Вт | N = A / t |
Время | t | с | t = А / N |
Постоянная | g ≈ 10 Н/кг | Н/кг |
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
Задача № 1. Действуя силой 80 Н, человек поднимает из колодца глубиной 10 м ведро воды за 20 с. Какую мощность развивает при этом человек?
Действуя силой 80 Н, человек поднимает из колодца глубиной 10 м ведро воды за 20 с. Какую мощность развивает при этом человек?
Задача № 2. Мощность тягового электродвигателя троллейбуса равна 86 кВт. Какую работу может совершить двигатель за 2 ч?
Задача № 3. Какую мощность развивает альпинист массой 80 кг, поднявшийся на высоту 500 м за 2 ч?
Задача № 4. Человек, поднимающий ведро воды из колодца за 15 с, развивает мощность 0,16 кВт. Какую работу он при этом совершает?
Задача № 5. Какую мощность развивает двигатель мотороллера, движущегося со скоростью 57,6 км/ч при силе тяги 245 Н?
Задача № 6. Для выборки кошелькового невода неводовыборочная машина с электрическим приводом развивает мощность, равную 2 кВт. За сколько времени она выберет невод длиной 500 м при силе тяги 5 кН?
Задача № 7. Мощность подъемного крана 10 кВт. Им можно равномерно поднять груз массой 2 т за 0,5 мин. Какую работу произведет в этом случае кран? На какую высоту переместит он груз?
Мощность подъемного крана 10 кВт. Им можно равномерно поднять груз массой 2 т за 0,5 мин. Какую работу произведет в этом случае кран? На какую высоту переместит он груз?
Краткая теория для решения задачи на механическую мощность
Конспект урока «Задачи на механическую мощность с решениями».
Следующая тема: «Задачи на простые механизмы».
Электромотор V6 (из моторчиков 775)
Приветствую всех любителей помастерить, предлагаю к рассмотрению инструкцию по изготовлению электрического мотора V6 из шести моторов на 12В модели 775. Такой агрегат автор в будущем будет использовать для изготовления лодки на воздушной тяге. Конечно, эффективность такой самоделки остается под вопросом, а стоить самоделка будет как полноценный мощный мотор на 12В. Ну, здесь уже каждый решает сам для себя, стоит ли оно того или нет.

Редуктор можно собрать из шестеренок от болгарок, но связь получается жесткой, и моторы могут друг другу мешать. В целом такой механизм может быть эффективным, если моторы подключать через храповики, тогда каждый мотор будет добавлять крутящий момент на основной вал, не мешая другим. Если проект вас заинтересовал, предлагаю изучить его более детально!
Материалы и инструменты, которые использовал автор:
Список материалов:
— 6 моторов 775;
— шестерни редукторов от болгарок;
— медная трубка;
— оргстекло, фанера, трубы или другой материал для основы;
— стальной стержень для оси;
— подшипники для оси;
— 6 кронштейнов для моторов 775;
— винты, саморезы;
— провода.
Список инструментов:
— токарный станок;
— дрель;
— напильники;
— тиски;
— болгарка;
— ножовка или торцовочная пила;
— паяльник.

Процесс изготовления самоделки:
Шаг первый. Установка ведущих шестеренок
Первым делом устанавливаем на валы моторов ведущие шестерни. Важно, чтобы все пары шестеренок были строго одинаковыми.
Посадочное отверстие шестерни оказалось великоватым, для решения проблемы автор вытачивает втулки из медной трубки. Сначала рассверливаем отверстие внутри трубки и напрессовываем кусочки на валы моторов.
Далее включаем моторы и обтачиваем втулки так, чтобы можно было плотно напрессовать шестерни. В завершении автор устанавливает шестерни на валы моторов с помощью тисков.
Шаг второй. Крепим моторы
Устанавливаем моторы на основу, вам понадобится два бруска из оргстекла, профильные трубы или другой материал на ваш вкус. Моторы устанавливаются по 4 штуки при помощи покупных кронштейнов.
Шаг третий. Ось самоделки
Ось для мотора автор выточил на токарном станке. На оси предусмотрены посадочные места под ведомые шестерни, а также проточены края под подшипники.

Шаг четвертый. Сборка мотора
Высверливаем посадочные места под подшипники и самоделку можно собирать. Автор все скрутил саморезами, но лучше собрать более крепкую раму из профильных труб и сварить ее.
В завершении припаиваем провода к контактам мотора. Важно все подключить так, чтобы все ведущие шестерни моторов вращались в сторону суммирования крутящего момента на основной оси.
Испытания
Мотор готов, смотрится интересно, конечно, шестерни хорошо бы смазать густой смазкой и все закрыть в корпус от пыли. Можно включать несколько моторов отдельно, тем самым контролируя мощность и экономя энергию. В следующей самоделке мы увидим, как на таком моторе автор соорудил лодку.
На этом проект завершен, надеюсь, вам самоделка понравилась, и вы нашли для себя полезные мысли. Удачи и творческих вдохновений, если решите повторить подобное. Не забывайте делиться с нами своими идеями и самоделками!
Источник (Source) Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст.
 Подробнее здесь.
Подробнее здесь.5 схем проверки электродвигателя мультиметром
Мне часто в последнее время друзья и соседи стали задавать вопрос: как проверить электродвигатель мультиметром? Вот я и решил написать небольшой обзор инструкцию для начинающих электриков.
Сразу замечу, что один мультиметр не позволяет выявить со 100% гарантией все возможные неисправности: мало его функций. Но порядка 90% дефектов им вполне можно найти.
Постарался сделать инструкцию универсальной для всех типов движков переменного тока. Эти же методики при вдумчивом подходе можно использовать в цепях постоянного напряжения.
Содержание статьи
Что следует знать о двигателе перед его проверкой: 2 важных момента
В рамках излагаемой темы достаточно представлять упрощенный принцип работы и особенности конструкции любого двигателя.
Принцип работы: какие электротехнические процессы необходимо хорошо представлять при ремонте
Любой движок состоит из стационарно закрепленного корпуса — статора и вращающегося в нем ротора, который еще называют якорь.
Его круговое движение создается за счет воздействия на него вращающегося магнитного поля статора, формируемого протеканием электрических токов по статорным обмоткам.
Когда обмотки исправны, то по ним текут номинальные расчетные токи, создающие магнитные потоки оптимальной величины.
Если сопротивление прводов или их изоляция нарушена, то создаются токи утечек, коротких замыканий и другие повреждения, влияющие на работу электродвигателя.
Между статором и ротором выполнен минимально возможный зазор. Его могут нарушить:
- разбитые подшипники;
- попавшие внутрь механические частицы;
- неправильная сборка и другие причины.
Когда происходит задевание вращающихся частей о неподвижный корпус, то создается их разрушение и дополнительные механические нагрузки. Все это требует тщательного осмотра, анализа состояния внутренних частей до начала электрических проверок.
Довольно часто не квалифицированный разбор является дополнительной причиной поломок. Пользуйтесь специальным инструментом и съемниками, исключающими повреждения граней валов.
Пользуйтесь специальным инструментом и съемниками, исключающими повреждения граней валов.
После разборки сразу во время осмотра проверяют люфты, свободный ход подшипников, их чистоту и смазку, правильность посадочных мест.
Кроме этого у коллекторного электродвигателя могут быть сильно изношены пластины или щетки.
Все это необходимо проверять до подачи рабочего напряжения.
Особенности конструкций, влияющие на технологию поиска дефектов
Обычно производитель электрические характеристики указывает на табличке, прикрепленной на корпусе. Этим сведениям стоит верить.
Однако часто во время ремонта или перемотки конструкция статора изменяется, а табличка остается прежняя. Этот вариант следует тоже учитывать.
Для бытовой сети 220 вольт могут использоваться двигатели:
- коллекторные с щеточным механизмом;
- асинхронные однофазные;
- синхронные и асинхронные трехфазные.
В схемах 380 вольт работают трехфазные синхронные и асинхронные электродвигатели.
Все они отличаются по конструкции, но, в силу работы по общим законам электротехники, позволяют использовать одинаковые методики проверок, заключающиеся в замерах электрических характеристик косвенными и прямыми методами.
Как проверить обмотку электродвигателя на статоре: общие рекомендации
Трехфазный статор имеет три встроенные обмотки. Из него выходит шесть проводов. В отдельных конструкциях можно встретить 3 или 4 вывода, когда соединение треугольник или звезда собрано внутри корпуса. Но так делается редко.
Определить принадлежность выведенных концов обмоткам позволяет прозвонка их мультиметром в режиме омметра. Надо просто один щуп поставить на произвольный вывод, а другим — поочередно замерять активное сопротивление на всех остальных.
Пара проводов, на которой будет обнаружено сопротивление в Омах, будет относиться к одной обмотке. Их следует визуально отделить и пометить, например, цифрой 1. Аналогично поступают с другими проводами.
Здесь надо хорошо представлять, что по закону Ома ток в обмотке создается под действием приложенного напряжения, которому противодействует полное сопротивление, а не активное, замеряемое нами.
Учитываем, что обмотки наматываются из одного провода с одинаковым числом витков, создающих равное индуктивное сопротивление. Если провод в процессе работы будет закорочен или оборван, то его активная составляющая, как и полная величина, нарушится.
Межвитковое замыкание тоже сказывается на величине активной составляющей.
Поэтому замеры активного сопротивления обмоток и их сравнение позволяют достоверно судить об исправности статорных цепей, делать вывод, что их целостность не нарушена.
Однофазный асинхронный двигатель: особенности статорных обмоток
Такие модели создаются с двумя обмотками: рабочей и пусковой, как, например, у стиральной машины. Активное сопротивление у рабочей цепочки в подавляющем большинстве случаев всегда меньше.
Поэтому когда из статора выведено всего три конца, то это означает, что между всеми ими надо измерять сопротивление. Результаты трех замеров покажут:
- меньшая величина — рабочую обмотку;
- средняя — пусковую;
- большая — последовательное соединение первых двух.


Как найти начало и конец каждой обмотки
Метод позволяет всего лишь выявить общее направление навивки каждого провода. Но для практической работы электродвигателя этого более чем достаточно.
Статор рассматривается как обычный трансформатор, что в принципе и есть на самом деле: в нем протекают те же процессы.
Для работы потребуется небольшой источник постоянного напряжения (обычная батарейка) и чувствительный вольтметр. Лучше стрелочный. Он более наглядно отображает информацию. На цифровом мультиметре сложно отслеживать смену знака быстро меняющегося импульса.
К одной обмотке подключают вольтметр, а на другую кратковременно подают напряжение от батарейки и сразу его снимают. Оценивают отклонение стрелки.
Если при подаче «плюса» в первую обмотку во второй трансформировался электромагнитный импульс, отклонивший стрелку вправо, а при его отключении наблюдается движение ее влево, то делается вывод, что провода имеют одинаковое направление, когда «+» прибора и источника совпадают.
В противном случае надо переключить вольтметр или батарейку — то есть поменять концы одной из обмоток. Следующая третья цепочка проверяется аналогично.
А далее я просто взял свой рабочий асинхронный движок с мультиметром и показываю на нем фотографиями методику его оценки.
Личный опыт: проверка статорных обмоток асинхронного электродвигателя
Для статьи я использовал свой новый карманный мультиметр Mestek MT102. Заодно продолжаю выявлять недостатки его конструкции, которые уже показал в статье раньше.
Электрические проверки выполнялись на трехфазном двигателе, подключенном в однофазную сеть через конденсаторы по схеме звезды.
Общая оценка состояния изоляции обмоток
Поскольку на клеммных выводах все обмотки уже собраны вместе, то замеры начал с проверки сопротивления их изоляции относительно корпуса. Один щуп стоит на клеммнике сборки нуля, а второй — на гнезде винта крепления крышки. Мой Mestek показал отсутствие утечек.
Другого результата я и не ожидал. Этот способ замера состояния изоляции очень неточный и большинство повреждений он выявить просто не сможет: питания батареек 3 вольта явно недостаточно.
Этот способ замера состояния изоляции очень неточный и большинство повреждений он выявить просто не сможет: питания батареек 3 вольта явно недостаточно.
Но все же лучше делать хоть так, чем полностью пренебрегать такой проверкой.
Для полноценного анализа диэлектрического слоя проводников необходимо использовать высокое напряжение, которое вырабатывают мегаомметры. Его величина обычно начинается от 500 вольт и выше. У домашнего мастера таких приборов нет.
Можно обойтись косвенным методом, используя бытовую сеть. Для этого на клеммы обмотки и корпуса подают напряжение 220 вольт через контрольную лампу накаливания мощностью порядка 75 ватт (токоограничивающее сопротивление, исключающее подачу потенциала фазы на замыкание) и последовательно включенный амперметр.
Ожидаемый ток утечки через нормальную изоляцию не превысит микроамперы или их доли, но рассчитывать надо на аварийный режим и начинать замеры на пределах ампер. Измерив ток и напряжение, вычисляют сопротивление изоляции.
Однако такая работа производится под действующим напряжением. Она опасна. Выполнять ее можно только тем работникам, кто имеет хорошие практические навыки электрика, имея минимум третью группу по технике безопасности.
Используя этот способ, учитывайте, что:
- на корпус движка подается полноценная фаза: он должен располагаться на диэлектрическом основании, не иметь контактов с другими предметами;
- даже временно собираемая схема требует надежной изоляции всех концов и проводов, прочного крепления всех зажимов;
- колба лампы может разбиться: ее надо держать в защитном чехле.
Замер активного сопротивления обмоток
Здесь требуется разобрать схему подключения проводов и снять все перемычки. Перевожу мультиметр в режим омметра и определяю активное сопротивление каждой обмотки.
Прибор показал 80, 92 и 88 Ом. В принципе большой разницы нет, а отклонения на несколько Ом я объясняю тем, что крокодил не обеспечивает качественный электрический контакт. Создается разное переходное сопротивление.
Создается разное переходное сопротивление.
Это один из недостатков этого мультиметра. Щуп плохо входит в паз крокодила, да к тому же тонкий металл зажима раздвигается. Мне сразу пришлось его поджимать пассатижами.
Замер сопротивления изоляции между обмотками
Показываю этот принцип потому, что его надо выполнять между каждыми обмотками. Однако вместо омметра нужен мегаомметр или проверяйте, в крайнем случае, бытовым напряжением по описанной мной выше методике.
Мультиметр же может ввести в заблуждение: покажет хорошую изоляцию там, где будут созданы скрытые дефекты.
Как проверить якорь электродвигателя: 4 типа разных конструкций
Роторные обмотки создают магнитное поле, на которое воздействует поле статора. Они тоже должны быть исправны. Иначе энергия вращающегося магнитного поля будет расходоваться впустую.
Обмотки якоря имеют разные конструкции у двигателей с фазным ротором, асинхронным и коллекторным. Это стоит учитывать.
Синхронные модели с фазным ротором
На якоре создаются выводы проводов в виде металлических колец, расположенных с одной стороны вала около подшипника качения.
Провода схемы уже собраны до этих колец, что наносит небольшие особенности на их проверку мультиметром. Отключать их не стоит, однако методика, описанная выше для статора, в принципе подходит и для этой конструкции.
Такой ротор тоже можно условно представить как работающий трансформатор. Требуется только сравнить индивидуальные сопротивления их цепочек и качество изоляции между ними, а также корпусом.
Якорь асинхронного электродвигателя
В большинстве случаев ситуация здесь намного проще, хотя могут быть и проблемы. Дело в том, что такой ротор выполнен формой «беличье колесо» и его сложно повредить: довольно надежная конструкция.
Короткозамкнутые обмотки выполнены из толстых стержней алюминия (редко меди) и прочно запрессованы в таких же втулках. Все это рассчитано на протекание токов коротких замыканий.
Однако на практике происходят различные повреждения даже в надежных устройствах, а их как-то требуется отыскивать и устранять.
Цифровой мультиметр для выявления неисправностей в обмотке «беличье колесо» не потребуется. Здесь нужно иное оборудование, подающее напряжение на короткое замыкание этого якоря и контролирующее магнитное поле вокруг него.
Здесь нужно иное оборудование, подающее напряжение на короткое замыкание этого якоря и контролирующее магнитное поле вокруг него.
Однако внутренние поломки таких конструкций обычно сопровождаются трещинами на корпусе, а их можно заметить при внимательном внутреннем осмотре.
Кому интересна такая проверка электрическими методами, смотрите видеоролик владельца Viktor Yungblyudt. Он подробно показывает, как определить обрыв стержней подобного ротора, что позволяет в дальнейшем восстановить работоспособность всей конструкции.
Коллекторные электродвигатели: 3 метода анализа обмотки
Принципиальная электрическая схема коллекторного двигателя в упрощенной форме может быть представлена обмотками ротора и статора, подключенными через щеточный механизм.
Схема собранного электродвигателя с коллекторным механизмом и щетками показана на следующей картинке.
Обмотка ротора состоит из частей, последовательно подключенных между собой определенным числом витков на коллекторных пластинах. Они все одной конструкции и поэтому имеют равное активное сопротивление.
Это позволяет проверять их исправность мультиметром в режиме омметра тремя разными методиками.
Самый простой метод измерения
Принцип №1 определения сопротивления между коллекторными пластинами я показываю на фото ниже.
Здесь я допустил одно упрощение, которое в реальной проверке нельзя совершать: поленился извлекать щетки из щеткодежателя, а они создают дополнительные цепочки, способные исказить информацию. Всегда вынимайте их для точного измерения.
Щупы ставятся на соседние ламели. Такое измерение требует точности и усидчивости. На коллекторе необходимо нанести метку краской или фломастером. От нее придется двигаться по кругу, совершая последовательные замеры между всеми очередными пластинами.
Постоянно контролируйте показания прибора. Они все должны быть одинаковыми. Однако сопротивление таких участков маленькое и если омметр недостаточно точно на него реагирует, то можно его очувствить увеличением длины измеряемой цепочки.
Способ №2: диаметральный замер
При этом втором методе потребуется еще большая внимательность и сосредоточенность. Щупы омметра необходимо располагать не на соседние ближайшие пластины, а на диаметрально противоположные.
Другими словами, щупы мультиметра должны попадать на те пластины, которые при работе электродвигателя подключаются щетками. А для этого их потребуется как-то помечать, дабы не запутаться.
Однако даже в этом случае могут встретиться сложности, связанные с точностью замера. Тогда придется использовать третий способ.
Способ №3: косвенный метод сравнения величин маленьких сопротивлений
Для измерения нам потребуется собрать схему, в которую входит:
- аккумулятор на 12 вольт;
- мощное сопротивление порядка 20 Ом;
- мультиметр с концами и соединительные провода.

Следует представлять, что точность измерения увеличивает стабильность созданного источника тока за счет:
- высокой емкости аккумулятора, обеспечивающей одинаковый уровень напряжения во время работы;
- повышенная мощность резистора, исключающая его нагрев и отклонение параметров при токах до одного ампера;
- короткие и толстые соединительные провода.
Один соединительный провод подключают напрямую к клемме аккумулятора и ламели коллектора, а во второй врезают токоограничивающий резистор, исключающий большие токи. Параллельно контактным пластинам садится вольтметр.
Щупами последовательно перебираются очередные пары ламелей на коллекторе и снимаются отсчеты вольтметром.
Поскольку аккумулятором и резистором на короткое время каждого замера мы выдаем одинаковое напряжение, то показания вольтметра будут зависеть только от величины сопротивления цепочки, подключенной к его выводам.
Поэтому при равных показаниях можно делать вывод об отсутствии дефектов в электрической схеме.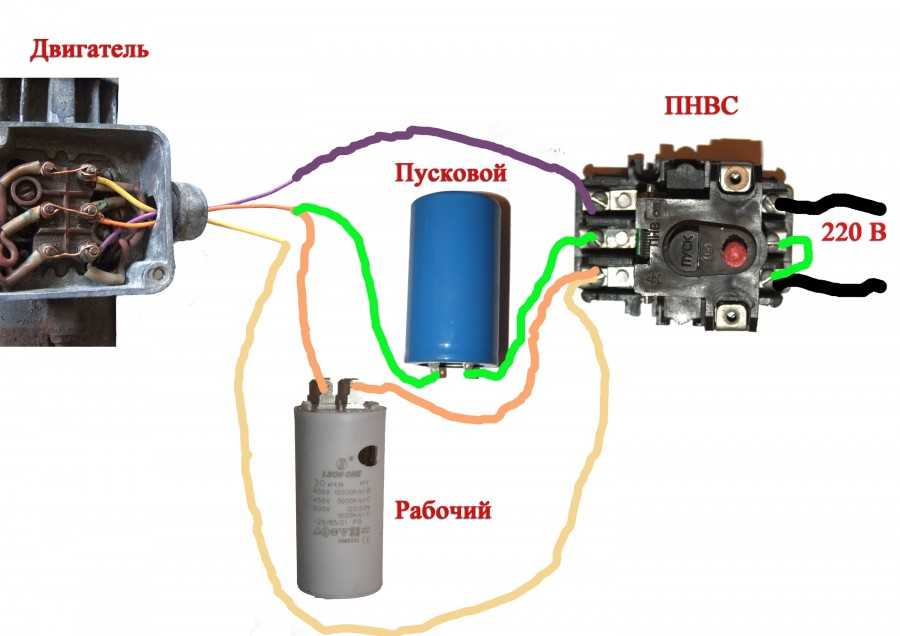
При желании можно измерить миллиамперметром величину тока через ламели и по закону Ома, воспользовавшись онлайн калькулятором, посчитать величину активного сопротивления.
Проверка состояния обмоток ротора коллекторного двигателя сильно зависит от класса точности мультиметра в режиме омметра.
Мой цифровой Mestek MT102, несмотря на выявленные в нем недостатки, нормально справляется с этой задачей.
Двигатели постоянного тока
Конструкция их ротора напоминает устройство якоря коллекторного двигателя, а статорные обмотки создаются для работы со схемой включения при параллельном, последовательном или смешанном возбуждении.
Раскрытые выше методики проверок статора и якоря позволяют проверять двигатель постоянного тока, как асинхронный и коллекторный.
Заключительный этап: особенности проверок двигателей под нагрузкой
Нельзя делать заключение об исправности электродвигателя, полагаясь только на показания мультиметра. Необходимо проверить рабочие характеристики под нагрузкой привода, когда ему необходимо совершать номинальную работу, расходуя приложенную мощность.
Включение подачей напряжения на холостой ход и проверка начала вращения ротора, как делают некоторые начинающие электрики, является типичной ошибкой.
Например, владелец очень короткого видео ЧАО Дунайсудоремонт считает, что замерив ток в обмотках, он убедился в готовности отремонтированного движка к дальнейшей эксплуатации.
Однако такое заключение можно дать только после выполнения длительной работы и оценки не только величин токов, но и замера температур статора и ротора, анализа систем теплоотвода.
Не выявленные дефекты неправильной сборки или повреждения отдельных элементов могут повторно вызвать дополнительный ремонт с большими трудозатратами. Если же у вас еще остались вопросы по теме, как проверить электродвигатель мультиметром, то задавайте их в комментариях. Обязательно обсудим.
Обязательно обсудим.
7.3: Электромоторы постоянного тока
Приводы — это механизмы, которые используются для воздействия на окружающую среду, обычно для перемещения механизмов или систем и управления ими. Приводы заставляют двигаться все элементы соревновательного робота, которые могут двигаться. Наиболее распространенным типом привода является электромотор, в частности, в роботах VEX используются электромоторы постоянного тока.
Электромоторы преобразуют электрическую энергию в механическую энергию путем использования электромагнитных полей и вращающихся проволочных катушек. При вводе напряжения в электромотор, последний выводит установленное количество механической мощности. Механическая мощность рассматривается как выход электромотора (обычно это ось, разъем или передача), вращающегося с определенной скоростью и при определенном крутящем моментe.
Нагружение электромотора
Электромоторы выводят крутящий момент только в ответ на нагружение. При отсутствии нагружения на выходе, электромотор будет вращаться очень быстро при нулевом крутящем моменте. Этого никогда не происходит в реальной жизни, так как в системе электромотора всегда присутствует трение, выполняющее роль нагрузки и заставляющее электромотор выводить крутящий момент для его преодоления. Чем больше нагрузка на электромотор, тем больше он «сопротивляется» с помощью противодействующего крутящего момента. Тем не менее, так как электромотор выводит заданное количество мощности, чем больше крутящий момент, выводимый электромотором, тем меньше его вращательная скорость. Чем больше работы должен произвести электромотор, тем медленнее он вращается. Если нагрузка на электромотор будет продолжать увеличиваться, в результате она превысит возможности электромотора и последний перестанет вращаться. Это называется «остановом».
При отсутствии нагружения на выходе, электромотор будет вращаться очень быстро при нулевом крутящем моменте. Этого никогда не происходит в реальной жизни, так как в системе электромотора всегда присутствует трение, выполняющее роль нагрузки и заставляющее электромотор выводить крутящий момент для его преодоления. Чем больше нагрузка на электромотор, тем больше он «сопротивляется» с помощью противодействующего крутящего момента. Тем не менее, так как электромотор выводит заданное количество мощности, чем больше крутящий момент, выводимый электромотором, тем меньше его вращательная скорость. Чем больше работы должен произвести электромотор, тем медленнее он вращается. Если нагрузка на электромотор будет продолжать увеличиваться, в результате она превысит возможности электромотора и последний перестанет вращаться. Это называется «остановом».
Потребление электроэнергии
Электромотор потребляет определенное количество электрического тока (выражаемого в Амперах), которое зависит от количества приложенной к нему нагрузки. При повышении нагрузки на электромотор, потребление электроэнергии электромотором увеличивается пропорционально повышению производимого им крутящего момента.
При повышении нагрузки на электромотор, потребление электроэнергии электромотором увеличивается пропорционально повышению производимого им крутящего момента.
Как показано на графике выше, ток прямо пропорционален нагружающему моменту (крутящий момент нагрузки). Чем больше нагружающий момент, тем больше потребление электроэнергии, при этом ток частота вращения обратно пропорциональны друг другу. Чем быстрее вращается электромотор, тем меньше электроэнергии он потребляет.
Ключевые характеристики электромотора
Электромоторы отличаются друг от друга и обладают различными свойствами, в зависимости от типа, конфигурации и способа производства. Существуют четыре основные характеристики, которыми обладают все электромоторы постоянного тока, используемые в соревновательной робототехнике.
Заданный крутящий момент (Н-м) — количество нагрузки, при приложении которого к электромотору последний перестанет двигаться.
Свободная скорость (об/мин) — максимальная частота вращения электромотора, работающего без нагрузки.
Ток заторможенного электромотора (Ампер) — количество электрического тока, потребляемого остановленным электромотором.
Свободный ток (Ампер) — количество электрического тока, потребляемого электромотором, работающим без нагрузки.
На этих взаимосвязях основывается концепция мощности. При заданном нагружении, электромотор может вращаться только с определенной скоростью.
Линейная и пропорциональная природа представленных выше взаимосвязей позволяет легко составлять графики «крутящий момент — скорость» и «крутящий момент — ток» для любого электромотора путем экспериментального определения двух точек на каждом графике.
Изменение мощности за счет напряжения
Выходная мощность электромотора постоянного тока зависит от входного напряжения. Это означает, что чем больше входное напряжение, тем больше мощности производится и тем быстрее может работать электромотор.
Если электромотор имеет заданное нагружение, что будет происходить при повышении напряжения (в результате увеличения мощности)? Электромотор будет вращаться быстрее! Для выполнения того же объема работы доступно большее количество мощности.
Это означает, что характеристики электромотора, приведенные выше, изменяются в зависимости от входного напряжения электромотора, поэтому их значения необходимо устанавливать при заданном напряжении (при испытаниях с напряжением 12 В). Эти четыре характеристики изменяются пропорционально входному напряжению. Например, если свободная скорость электромотора составляет 50 об/мин при напряжении 6 В, при удваивании напряжения до 12 В свободная скорость также удваивается и принимает значение 100 об/мин.
Значения этих характеристик при определенном напряжении могут быть рассчитаны в том случае, если известны их значения при другом напряжении, путем умножения известного значения на коэффициент значений напряжения. Этот подход не применим к определению свободного тока электромотора, так как его значение остается постоянным при любом напряжении.
Новое значение = Определенное значение х (Новое значение/Определенное значение)
Из примера выше видно, что свободная скорость электромотора составляет 50 об/мин при напряжении 6 В. Проектировщик планирует использовать электромотор при напряжении 8 В. Какова будет свободная скорость электромотора при этом напряжении?
Проектировщик планирует использовать электромотор при напряжении 8 В. Какова будет свободная скорость электромотора при этом напряжении?
Свободная скорость @ 8 В = Свободная скорость @ 6 В x (8 В / 6 В) = 50 об/мин x (8/6) = 66,66 об/мин
Как можно использовать изменение напряжения в управлении роботом? Электромоторы робота представляют собой не просто устройства, работающие по системе «вкл/откл». Проектировщик робота может изменять напряжение электромотора, работающего при нагрузке, для получения различных значений мощности и скорости. Для этого используются моторные контроллеры, регулирующие напряжение, поступающее к электромоторам.
Предельные значения и расчеты для электромотора
Означает ли это, что проектировщик может продолжать увеличивать напряжение электромотора до тех пор, пока последний не сможет выводить количество мощности, достаточное для выполнения задачи? Не совсем так. Электромоторы имеют ограничения. С одной стороны, приобретенная мощность будет слишком большой для электрических обмоток (как правило, обмотка начнет гореть, выделяя белый дым). К счастью, электромоторы VEX лишены подобных проблем, так как снабжены встроенными тепловыми реле, блокирующими поступление электрического тока в электромотор в случае его перегрева. Такое решение является очень удачным, так как электромотор не может перегореть, но при этом возникает новое условие для проектировщиков, выраженное в необходимости предотвращения срабатывания предохранителей электромотора. Как это сделать? Путем проектирования системы таким образом, чтобы исключить превышение установленного потребления тока электромотором за счет ограничения количества нагрузки на него.
С одной стороны, приобретенная мощность будет слишком большой для электрических обмоток (как правило, обмотка начнет гореть, выделяя белый дым). К счастью, электромоторы VEX лишены подобных проблем, так как снабжены встроенными тепловыми реле, блокирующими поступление электрического тока в электромотор в случае его перегрева. Такое решение является очень удачным, так как электромотор не может перегореть, но при этом возникает новое условие для проектировщиков, выраженное в необходимости предотвращения срабатывания предохранителей электромотора. Как это сделать? Путем проектирования системы таким образом, чтобы исключить превышение установленного потребления тока электромотором за счет ограничения количества нагрузки на него.
Расчет нагрузки на руку
В примере, представленном выше, известный электромотор управляет движением руки робота при известном напряжении. В данном сценарии, какую максимальную массу может стабильно удерживать робот?
Чтобы решить эту задачу, проектировщик должен понимать, что максимальная масса, которую робот может удерживать стабильно, возникает при предельном перегрузочном моменте электромотора. Если электромотор находится в остановленном состоянии, он прикладывает к руке робота длиной 0,25 метра крутящий момент, равный 1 Н. Крутящий момент = Сила * Расстояние
Если электромотор находится в остановленном состоянии, он прикладывает к руке робота длиной 0,25 метра крутящий момент, равный 1 Н. Крутящий момент = Сила * Расстояние
Сила = Крутящий момент/Расстояние = 1 ньютон-метр/0,25 метра = 4 ньютона
Рука может удерживать до 4 ньютонов при остановленном электромоторе. При любом превышении, рука опрокинется.
Расчет крутящей нагрузки из предельного тока:
Это просто, но ситуация усложняется, когда необходимо учесть предельный ток. Например, в электромоторе из примера, представленного выше, установлен выключатель предельного тока, который сработает при потреблении свыше 2 ампер. Какова максимальная масса, которую робот может удерживать без срабатывания выключателя?
Теперь, электромотор не работает при предельном перегрузочном моменте — в режиме останова электромотор будет потреблять ток заторможенного электромотора, равный 3 амперам, что вызовет срабатывание предохранителя. Проектировщик должен выяснить, какую крутящую нагрузку должен испытывать электромотор, чтобы его потребление тока не достигало 2 ампер. Как это реализовать?
Как это реализовать?
Глядя на график выше и помня о том, что взаимосвязи линейны, крутящая нагрузка при любом заданном потреблении тока может быть рассчитана с помощью уравнения.
Уравнение для линии: y = mx + b, где y — это значение по оси y, x — это значение по оси x, m — это уклон линии, и b — это место пересечения линии с осью y (точка пересечения с осью y).
Уклон линии может быть выражен как: m = (изменение по Y / изменение по X) = (ток заторможенного электромотора — свободный ток) / предельный перегрузочный момент
Точка пересечения с осью Y обозначает свободный ток.
Значение Y — это ток в заданной точке линии, и значение X — это крутящая нагрузка в этой точке.
Уравнение может быть представлено следующим образом:
Ток = ((ток заторможенного электромотора — свободны ток) / предельный перегрузочный момент) х крутящая нагрузка + свободный ток
Для крутящей нагрузки это же уравнение выглядит следующим образом:
Крутящая нагрузка = (ток — свободный ток) х предельный перегрузочный момент / (ток заторможенного электромотора — свободный ток)
С помощью параметров из примера выше может быть установлена крутящая нагрузка, при которой значение потребления тока будет равно 2 амперам.
Крутящая нагрузка = (2 ампера — 1 ампер) х 1 Н-м / (3 ампера — 1 ампер)
Крутящая нагрузка = (1,9 ампер) х 10 Н-м / (2,9 ампер)
Крутящая нагрузка = 0,655 Н-м
На основании данного расчета проектировщик может сделать вывод, что если значение крутящего момента электромотора превышает 0,655 Н-м, его потребление электричества превысит 2 ампера, при этом предохранитель сработает. Остается рассчитать количество силы, которой должна обладать рука.
Сила = Крутящий момент/Расстояние = 0,655 Н-м / 0,25 м = 2,62 Н
Если рука робота подбирает объект, масса которого превышает 2,62 Н, это спровоцирует срабатывание предохранителя.
Расчет скорости электромотора из крутящей нагрузки
В примере, представленном выше, какова скорость электромотора при предельном токе? На основании расчетов, выполненных на предыдущем этапе, проектировщик должен определить скорость электромотора при нагрузке 0,655 Н-м.
Глядя на график, изображенный выше, скорость электромотора при любой крутящей нагрузке может быть рассчитана с помощью уравнения, аналогичного уравнению для расчета потребления тока (предыдущий пример).
В этом случае, уклон линии выражается как m = (изменение по Y) / (изменение по X) = (свободная скорость) / (предельный перегрузочный момент).
Примечание: уклон имеет отрицательное значение.
Точка пересечения с осью Y обозначает свободную скорость.
Значение Y — это скорость в заданной точке линии, и значение X — это крутящая нагрузка в этой точке.
Уравнение выглядит следующим образом:
Скорость = (свободная скорость / предельный перегрузочный момент) х крутящая нагрузка + свободная скорость
С помощью параметров из примера выше может быть установлена скорость электромотора при крутящей нагрузке, равной 6,55 фунто-дюймов:
Скорость = -(100 об/мин / 1 Н-м) x 0,655 Н-м + 100 об/мин
Скорость = -(100 об/мин/Н-м) x 0,655 Н-м + 100 об/мин
Скорость = 65,5 об/мин + 100 об/мин = 34,5 об/мин
При потреблении 2 ампер тока и подъеме объекта массой 2,62 Н, электромотор будет вращаться со скоростью 34,5 об/мин при крутящей нагрузке 0,655 Н-м.
Несколько электромоторов
Если для выполнения задачи требуется больше мощности, чем может обеспечить один электромотор, у проектировщика есть три варианта действий:
- 1. Изменить проектные требования таким образом, чтобы для выполнения задачи было достаточно меньшей мощности.
2. Перейти на использование более мощного электромотора.
3. Увеличить количество электромоторов.
Что произойдет при использовании в проекте нескольких электромоторов? Очень просто — крутящая нагрузка будет распределена между ними. При крутящем моменте 2 Н-м, каждый электромотор будет иметь крутящую нагрузку 1 Н-м и реагировать соответственно.
Это можно представить так, что электромоторы принимают на себя характеристики супер-мотора, при этом характеристики отдельных электромоторов суммируются. Суммируются значения предельного перегрузочного момента, тока заторможенного электромотора, свободного тока, при этом свободная скорость остается неизменной.
В таблице выше представлены спецификации 2-проводного электромотора VEX 393, а также спецификации при комбинировании двух электромоторов для выполнения одной задачи.
В примере выше, сколько электромоторов VEX 393 необходимо для стабильного удерживания объекта?
Крутящая нагрузка на электромоторы рассчитывается следующим образом:
Крутящая нагрузка = сила х расстояние = 22 Н х 0,25 м = 5,5 Н-м
Данную крутящую нагрузку можно сравнить с предельным перегрузочным моментом электромотора VEX 393 и определить требуемое количество.
5,5 Н-м / 1,67 Н-м = 3,29 электромоторов
Таким образом, для удержания руки в поднятом положении (пример выше) необходимо 4 электромотора.
Топ-10 электромоторов для троллинга и рыбалки: рейтинг Клуба Серьезных Рыбаков
Рыбная ловля в надувной или каркасной лодке, байдарке или каноэ давно волнует сердца заядлых рыболовов. Бесшумное передвижение по спокойному озеру, забота об экологии и разумеется использование современных технологий, как GPS, заякоривание на заданной точке или неспешное движение с заданной скоростью – всё это значительно прибавляет преимуществ в копилку достоинств электрических, лодочных моторов. Клуб Серьезных Рыбаков подготовил рейтинг топ 10 электромоторов для троллинга и рыбалки.
10. Электромотор Outsunny Transom 36lb
Компактный, лодочный электромотор Outsunny Transom считается надежным и практичным помощником для троллинговой рыбной ловли, производимый в США. Электрический двигатель крепится на транец с помощью винтов струбцины, имеет мощь 354W и 12В и развивает скорость 6,5 км/ч. Мотор оснащен пятью передними и тремя задними скоростями, управление осуществляется удобной телескопической ручкой. Модель станет отличным выбором для тех, кто любит рыбалку и проводить время в семейном кругу на природе.
9. Электромотор HDX 36 L
Легкий, компактный электромотор HDX 36 L производства КНР позволит рыбачить или степенно передвигаться по спокойному, пресному водоему, со скоростью 11 км/ч. Крепление к транцу на винты струбцины, телескопическая ручка румпеля, светодиодная индексация заряда батареи – этот неплохой электрический движок имеет всё необходимое для практичного выхода за рыбкой.
8. Электромотор WaterSnake ASP T24-FW
Лодочный электромотор WaterSnake ASP T24-FW, производимый австралийской компнией Jarvis Walker в Китае, весит всего 3,5 кг. Это отличный вариант для рыбалки на небольших озёрах и предназначен для установки на надувные и пластиковые лодки до 3 метров длиной. Мотор имеет две передние и две задние скорости. Двигатель устанавливается на транец и фиксируется винтами струбцины, дейдвуд имеет семь положений регулировки угла наклона.
Рукоять управления — румпель удобно складывается телескопическим способом непосредственно в головную часть двигателя, делая транспортировочный размер моторов еще меньше. Модель предназначена для эксплуатации в пресной воде.
7. Электромотор Watersnake Tracer
Лодочный электромотор Watersnake Tracer FWT54TH 26 австралийской фирмы Jarvis Walke производится в Китае и рассчитан надувные лодки, RIB-лодки, пластиковые или алюминиевые лодки и катера массой до 1100 кг.
Электрический двигатель имеет пять передних и две задние скорости. Двигатель устанавливается на транец и фиксируется винтами струбцины, дейдвуд имеет семь положений регулировки угла наклона.
Телескопический румпель, с помощью которого происходит управление движком, и регулируемый дейдвуд помогут настроить положение электромотора относительно транца. Система фиксации защищает от непроизвольного изменения положения румпеля. Специальная форма гребного винта позволяет ему гораздо меньше цепляться за траву и водоросли, что удобно для эксплуатации по заболоченным, отечественным водоемам.
6. Электромотор MotorGuide X5
Лодочный электромотор MotorGuide X5 производятся в США, неподалеку от города Тусла в штате Оклахома. Троллинговый, электрический мотор понравится ценителям комфортной и безопасной рыбалки. Двигатель оснащен беспроводным управлением с навигацией Pinpoint Connect и опцией GPS якорь (электронный якорь), также возможностью интеграции в эхолоты Lowrance HDS GEN3 и Ti9.
Модель удобна в использовании в качестве основного двигателя или как помощник в катере. С этим движком можно задавать путь, поддерживать курс, подключаться к эхолоту, управлять мотором с пульта, задать круиз-контроль и многое другое. К слову сказать, модный и навороченный электромотор очень прост в эксплуатации, инструкция на русском языке прилагается.
5. Электромотор Minn Kota Endura Max 40
Лодочный электромотор Minn Kota Endura Max производится в США американской компанией Johnson Outdoors. Модель, созданная для троллинга, имеет 40 степеней регулировки тяги, рычаг блокировки кронштейна и телескопический румпель для управления.
Высокопрочная, композитная ручка «cool quite power» и функция «digital maximizer», сохраняющая заряд до пяти раз дольше обычной зарядки, наделяют электрический двигатель надежность и прочностью эксплуатации в пресной воде.
Модель имеет защиту штанги мотора при столкновении и комплектуется индикатором разряда батареи. Электродвижок для лодки устанавливается на транец, позволяет легко управлять лодкой до 850 кг. Имеется защита от перегрева.
4. Электромотор Newport Vessels L-Series 62
Стильный, легкий, лодочный электромотор Newport Vessels L-Series 62 производства США – это легкая в управлении, бесшумная модель для комфортной ловли рыбы хоть целый день. С этим двигателем рыбак будет бесшумно передвигаться по воде, не спугнет рыбу, и не перегреет свой движок. Стеклопластиковый, композитный, гребной винт полностью регулируется и обеспечивает правильное размещение по глубине при любой погоде.
Электрический мотор имеет 8 скоростей, из которых пять передних и три задние, телескопическую ручку управления. Считывание и отражение заряда батареи обеспечивает десятиточечный светодиодный индикатор.
Двигатель отличается коррозийной устойчивостью за счет нержавеющей, стальной конструкции, готов к работе в пресной и морской воде. Производитель предоставляет 2 года гарантии.
3. Электромотор Minn Kota Power Drive
Уже известный выше бренд из США лодочный электромотор Minn Kota Power Drive – это модель, предназначенная для эксплуатации в пресной воде. Двигатель оснащензащитой штанги при столкновении. В комплекте идет индикатор разряда батареи. Питание 12 В. Длина штанги — 137 см.
Устанавливается на лодочный нос. Комфорт управления обеспечивает педаль управления, с помощью которой можно вести лодку, массой до 1250 кг. Ножная влагостойкая педаль оснащена шестиметровым шнуром, которого достаточно для всех моделей лодок. Компактный пульт управления легко закрепляется на поясе, удилище или запястье рыбака. Есть рычаг резкого увеличения мощности, крайне полезный при погоне за рыбой. Реакция на его включение быстрая и четкая.
Двигатель изготовлен из прочных материалов, невосприимчивых к ударным нагрузкам. Приоритет отдан долговечному и гибкому углепластику. Винты рассчитаны на работу в любых водоемах, в том числе и мелководных, с болотной растительностью. При извлечении из воды мотор автоматически отключается.
2. Электромотор Minn Kota TRAXXIS 45
Лодочный электромотор Minn Kota TRAXXIS 45 считается одной из легких моделей двигателей с электроникой. Мотор прост в управлении, легок при перевозке и транспортировке.
Электрический мотор устанавливается на транец с помощью универсальной системы с десятью вариантами установки углов наклона и механизмом быстрого съема одной рукой.
Движок оснащен винтом с системой защиты от наматывания водорослей и последующим их сбросом. Мотор работает бесшумно за счет корпуса из высокопрочного углепластика и новых подшипников сниженного трения. Хорошо управляется при частичной и полной загрузке лодки. Предусмотрена плавная регулировка скоростей. Тяга от 18 до 24,9 кг. Для мотора выпускается широкая линейка дополнительных аксессуаров от бортовых батарей до портативных зарядных устройств.
1. Электромотор Minn Kota Endura C2
Лодочный электромотор Minn Kota Endura C2 – это троллинговый двигатель для малых и средних лодок. Двигатель управляется с помощью телескопического румпеля. Корпус двигателя и штанга снабжены системами защиты от ударных и других видов нагрузок. Кроме того, композитный вал агрегата обработан специальным материалом, который позволяет контролировать отсутствие на поверхности различного рода повреждений: трещин, коррозии, изломов.
Лодочным мотором Minn Kota Endura C2 просто и легко управлять: в узких протоках, на поворотах, при необходимом резком маневре – всюду движок демонстрирует отличную работу и маневренность. Мотор фиксируется на транце с помощью кронштейна с подшипниковым поворотным креплением. Мотор удобен для передвижения по болотистому водоему, озеру, богатой растительностью, мелководью.
FAQ по электродвигателям | Техпривод
Какие электродвигатели применяются чаще всего?
Какие способы управления электродвигателями используются?
Как прозвонить электродвигатель и определить его сопротивление?
Как определить мощность электродвигателя?
Как увеличить или уменьшить обороты электродвигателя?
Как рассчитать ток и мощность электродвигателя?
Как увеличить мощность электродвигателя?
Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?
Какие исполнения двигателей бывают?
Зачем электродвигателю тормоз?
Как двигатель обозначается на электрических схемах?
Почему греется электродвигатель?
Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы:
Выбор электродвигателя
Использование тормозных резисторов с преобразователями частоты
% PDF-1.4 % 25352 0 объект > endobj xref 25352 74 0000000016 00000 н. 0000001839 00000 н. 0000002083 00000 н. 0000002151 00000 п. 0000015698 00000 п. 0000016229 00000 п. 0000016319 00000 п. 0000016414 00000 п. 0000016535 00000 п. 0000016662 00000 п. 0000016721 00000 п. 0000016902 00000 п. 0000016960 00000 п. 0000017107 00000 п. 0000017165 00000 п. 0000017290 00000 п. 0000017348 00000 п. 0000017509 00000 п. 0000017567 00000 п. 0000017714 00000 п. 0000017772 00000 п. 0000017931 00000 п. 0000017989 00000 п. 0000018110 00000 п. 0000018168 00000 п. 0000018298 00000 п. 0000018355 00000 п. 0000018476 00000 п. 0000018533 00000 п. 0000018653 00000 п. 0000018710 00000 п. 0000018824 00000 п. 0000018881 00000 п. 0000018990 00000 п. 0000019047 00000 п. 0000019103 00000 п. 0000019163 00000 п. 0000019195 00000 п. 0000019227 00000 п. 0000019661 00000 п. 0000020716 00000 п. 0000020795 00000 п. 0000030897 00000 п. 0000032783 00000 п. 0000034653 00000 п. 0000034678 00000 п. 0000035249 00000 п. 0000053029 00000 п. 0000054911 00000 п. 0000061013 00000 п. 0000061219 00000 п. 0000061607 00000 п. 0000063237 00000 п. 0000064554 00000 п. 0000065173 00000 п. 0000066294 00000 п. 0000066727 00000 п. 0000068620 00000 н. 0000086918 00000 п. 0000086942 00000 п. 0000086966 00000 п. 0000087175 00000 п. 0000087949 00000 п. 0000087973 00000 п. 0000088129 00000 п. 0000088283 00000 п. 0000088437 00000 п. 0000088593 00000 п. 0000088747 00000 п. 0000088901 00000 п. 0000089055 00000 п. 0000089209 00000 п. 0000002293 00000 н. 0000015672 00000 п. трейлер ] >> startxref 0 %% EOF 25353 0 объект > >> endobj 25354 0 объект > endobj 25355 0 объект > endobj 25424 0 объект > ручей HTPS $ 7 1 @ & @ NZ & 7`ECvC4 «(..` # ͆ngQ.P ݩ d2tug ۙ tgΜ
Что такое электротехника? | Живая наука
Электротехника — одна из новейших отраслей машиностроения, возникшая в конце 19 века. Это отрасль техники, которая занимается технологиями электричества. Инженеры-электрики работают над широким спектром компонентов, устройств и систем, от крошечных микрочипов до огромных генераторов электростанций.
Ранние эксперименты с электричеством включали примитивные батареи и статические заряды.Однако фактическое проектирование, конструирование и изготовление полезных устройств и систем началось с реализации закона индукции Майкла Фарадея, который, по сути, гласит, что напряжение в цепи пропорционально скорости изменения магнитного поля в цепи. Этот закон применяется к основным принципам работы электрогенератора, электродвигателя и трансформатора. Наступление современной эпохи ознаменовано появлением электричества в домах, на предприятиях и в промышленности, и все это стало возможным благодаря инженерам-электрикам.
Среди самых выдающихся пионеров электротехники — Томас Эдисон (электрическая лампочка), Джордж Вестингауз (переменный ток), Никола Тесла (асинхронный двигатель), Гульельмо Маркони (радио) и Фило Т. Фарнсворт (телевидение). Эти новаторы превратили идеи и концепции об электричестве в практические устройства и системы, которые положили начало современной эпохе.
С момента своего зарождения область электротехники выросла и разветвлялась на ряд специализированных категорий, включая системы производства и передачи энергии, двигатели, аккумуляторы и системы управления.Электротехника также включает электронику, которая подразделяется на еще большее количество подкатегорий, таких как радиочастотные (RF) системы, телекоммуникации, дистанционное зондирование, обработка сигналов, цифровые схемы, приборы, аудио, видео и оптоэлектроника.
Область электроники родилась с изобретением в 1904 году Джоном Амброузом Флемингом термоэлектронной ламповой диодной лампы. Электронная лампа в основном действует как усилитель тока, выдавая ток, кратный входному.Он был основой всей электроники, включая радио, телевидение и радары, до середины 20 века. Он был в значительной степени вытеснен транзистором, который был разработан в 1947 году в лабораториях AT&T Bell Laboratories Уильямом Шокли, Джоном Бардином и Уолтером Браттейном, за что они получили Нобелевскую премию по физике 1956 года.
Чем занимается инженер-электрик?
«Инженеры-электрики проектируют, разрабатывают, тестируют и контролируют производство электрического оборудования, такого как электродвигатели, радиолокационные и навигационные системы, системы связи и оборудование для выработки электроэнергии, — заявляет U.С. Бюро статистики труда. «Инженеры-электронщики проектируют и разрабатывают электронное оборудование, такое как системы вещания и связи — от портативных музыкальных плееров до систем глобального позиционирования (GPS)».
Если это практичное, реальное устройство, которое производит, проводит или использует электричество, по всей вероятности, оно было разработано инженером-электриком. Кроме того, инженеры могут проводить или составлять спецификации для разрушающего или неразрушающего контроля производительности, надежности и долговечности устройств и компонентов.
Современные инженеры-электрики проектируют электрические устройства и системы с использованием основных компонентов, таких как проводники, катушки, магниты, батареи, переключатели, резисторы, конденсаторы, катушки индуктивности, диоды и транзисторы. Почти все электрические и электронные устройства, от генераторов на электростанции до микропроцессоров в вашем телефоне, используют эти несколько основных компонентов.
Важнейшие навыки, необходимые в электротехнике, включают глубокое понимание теории электричества и электроники, математики и материалов.Эти знания позволяют инженерам разрабатывать схемы для выполнения определенных функций и удовлетворения требований безопасности, надежности и энергоэффективности, а также прогнозировать их поведение до реализации проекта оборудования. Иногда, однако, схемы конструируются на «макетных платах» или прототипах печатных плат, изготовленных на станках с числовым программным управлением (ЧПУ), для тестирования перед запуском в производство.
Инженеры-электрики все чаще полагаются на системы автоматизированного проектирования (CAD) для создания схем и компоновки схем.Они также используют компьютеры для моделирования работы электрических устройств и систем. Компьютерное моделирование можно использовать для моделирования национальной электросети или микропроцессора; поэтому для инженеров-электриков очень важно владение компьютерами. Помимо ускорения процесса создания схем, макетов печатных плат (PCB) и чертежей электрических и электронных устройств, системы CAD позволяют быстро и легко изменять конструкции и создавать прототипы с помощью станков с ЧПУ.Полный список необходимых навыков и способностей для инженеров-электриков и электронщиков можно найти на MyMajors.com.
Работа и зарплата в области электротехники
Инженеры-электрики и электронщики работают в основном в научно-исследовательских и опытно-конструкторских отраслях, компаниях, оказывающих инженерные услуги, на производстве и в правительстве, согласно BLS. Как правило, они работают в помещении или в офисах, но им, возможно, придется посетить места, чтобы увидеть проблему или сложное оборудование, сообщает BLS.
Обрабатывающие отрасли, в которых работают инженеры-электрики, включают автомобильную, морскую, железнодорожную, аэрокосмическую, оборонную, бытовую электронику, коммерческое строительство, освещение, компьютеры и компоненты, телекоммуникации и управление движением. Государственные учреждения, в которых работают инженеры-электрики, включают транспортные департаменты, национальные лаборатории и военные.
Для большинства вакансий в области электротехники требуется как минимум степень бакалавра технических наук. Многие работодатели, особенно те, которые предлагают услуги инженерного консалтинга, также требуют государственной сертификации в качестве профессионального инженера.Кроме того, многие работодатели требуют сертификации Института инженеров по электротехнике и электронике (IEEE) или Института инженерии и технологий (IET). Степень магистра часто требуется для продвижения к руководству, а постоянное образование и подготовка необходимы, чтобы идти в ногу с достижениями в области технологий, испытательного оборудования, компьютерного оборудования и программного обеспечения, а также государственных постановлений.
По состоянию на июль 2014 года, диапазон заработной платы для недавно получившего диплом инженера-электрика со степенью бакалавра составляет от 55 570 до 73 908 долларов, согласно Salary.com. Диапазон для инженера среднего звена со степенью магистра и стажем от 5 до 10 лет составляет от 74 007 до 108 640 долларов, а для старшего инженера со степенью магистра или доктора и более 15 лет опыта — от 97 434 до 138 296 долларов. Многие опытные инженеры с учеными степенями продвигаются на руководящие должности или открывают собственный бизнес, где они могут зарабатывать еще больше.
Будущее электротехники
Предполагается, что занятость инженеров-электриков и электронщиков вырастет на 4 процента в период с настоящего момента до 2022 года из-за «универсальности этих специалистов в разработке и применении новых технологий», говорится в сообщении BLS.
Приложения этих новых технологий включают изучение красных электрических вспышек, называемых спрайтами, которые парят над некоторыми грозами. Виктор Пасько, инженер-электрик из Пенсильванского университета, и его коллеги разработали модель эволюции и исчезновения странной молнии.
Другой инженер-электрик, Андреа Алу из Техасского университета в Остине, изучает звуковые волны и разработала одностороннюю звуковую машину. «Я могу слушать вас, но вы не можете обнаружить меня; вы не можете слышать мое присутствие», — сказал Алу LiveScience в статье 2014 года.
И Мишель Махарбиз, инженер-электрик из Калифорнийского университета в Беркли, изучает способы беспроводной связи с мозгом.
В BLS говорится: «Быстрые темпы технологических инноваций и разработок, вероятно, будут стимулировать спрос на инженеров-электриков и электронщиков в исследованиях и разработках, в области, в которой потребуется инженерный опыт для разработки систем распределения, связанных с новыми технологиями».
Дополнительные ресурсы
eCalc — надежное моделирование электропривода
новости — 12 ноября
12.11.20 — База двигателей: RCinPower GTS V2 и SmooX добавили
11/3/20 — ev Расчет: Audi e-tron GT / RS добавил
11/3/20 — ev Расчет: BYD Хан и Тан добавили
31.10.20 — ev Расчет: JAC e-S2 добавил
25.10.20 — База аккумуляторов: Sony US18650VTC6, Molicel INR21700-P42A добавлены
29.09.20 — База двигателей: Tmotor F90, Peggy Pepper 2524, Surpass C5065, Hacker B50-S обновлено, MAD M30-100, BrotherHobby VY, Max
25.09.20 — 150 миллионов дисков Расчет — спасибо за использование eCalc!
15.09.20 — База двигателей: Добавлен бренд Surpass
15.09.20 — База двигателей: DYS SF, SHU, WEI & WU серия обновлена
15.09.20 — ev Расчет: Opel Zafira-e добавил
9/12/20 — ev Расчет: Lucid Air — Dream Edition, Grand Touring & Touring добавлены
28.08.20 — ev Расчет: Обновлен Lucid Air, Mercedes EQC 350 и Hyundai 45 добавлены
24.08.20 — заряд Index V1.0: начисление на основе первого потребления сравнение — единственное объективное сравнение цен между брендами
21.08.20 — База данных двигателей: Скорпион HK-4525-370, Leomotion L8013-205, Flywoo 1404, Kontronik Кира обновил
25.06.20 — База данных двигателей: Dualsky Product Alignment, Cobra 2204/40, новые бренды Flywoo, Apex, Шпиц
24.06.20 — ev Расчет V 5.20: первыми учитывают реальный ветер по маршруту
13.05.20 — e Calc Версия 7.20 — Что нового?
- новый плагин Quick Gauge
- xcopter Расчет : Оценка диапазона в столбце результатов
- вертолет Расчет: Расчет Motot @ Maximum для постоянной скорости вращения (iso max. скорость)
13.05.20 — ev Calc Версия 5.10 — Какие новости?
- Время перезарядки на графике улучшено учитывая низкий / высокий SoC
- новый плагин Quick Gauge
- Служба маршрутизации изменена на MapBox, TomTom & GrasHopper
13.05.20 — заряд Расчет Версия 2,03 — Какие новости?
21.01.20 — Мы рады приветствовать 9-миллионное посещение с момента обратного отсчета февраль 2010.
Обозначения электродвигателей— AC / DC, однофазные / трехфазные двигатели
Обозначения электродвигателей переменного / постоянного тока, однофазные и трехфазные электродвигатели
Список всех символов электродвигателей на одном изображении приведен ниже для справки на конец этого поста.
Обмотка / катушка электродвигателя
Этот символ обозначает обмотку или катушку электродвигателя. Обмотка внутри двигателя создает необходимое магнитное поле при возбуждении электрическим током.
Обмотка серии
Обмотка возбуждения, подключенная последовательно к обмотке якоря двигателя, называется последовательной обмоткой. Ток, потребляемый в таком двигателе, огромен, так как он работает последовательно и производит довольно большой крутящий момент.
Шунтирующая обмотка
Обмотка возбуждения, подключенная параллельно обмотке якоря двигателя, называется шунтирующей обмоткой. Сопротивление шунтирующей обмотки обычно велико, чтобы предотвратить протекание большого тока.
Угольная щетка
Это компонент внутри электродвигателя, который передает электрический ток между статором (неподвижная часть) и ротором (вращающаяся часть). Обычно он сделан из графита, и его можно заменить во время технического обслуживания после износа.
Стандартный двигатель
Это обозначение стандартного электродвигателя, используемого в электрических схемах. Двигатель преобразует электрическую энергию в механическую.
Двухскоростной двигатель
Этот символ представляет двухскоростной двигатель. Такой тип двигателей имеет две отдельные обмотки для разного передаточного числа. Каждая обмотка одновременно обеспечивает разную скорость и крутящий момент.
Двигатель переменного тока
Этот символ представляет двигатель переменного тока. Этот тип двигателя работает только от переменного тока. Он преобразует электрическую энергию переменного тока в механическую.
Двигатель постоянного тока
Этот символ используется для обозначения двигателя постоянного тока на любой электрической схеме.Он преобразует электрическую энергию постоянного тока в механическую. Работает только на постоянном токе.
Линейный двигатель
Это общий символ, используемый для обозначения линейного двигателя. У линейного двигателя статор развернут, что приводит к созданию линейной силы вместо вращающего момента.
Шаговый двигатель
Шаговый двигатель или шаговый двигатель — это тип бесщеточного двигателя постоянного тока, полное вращение которого делится на количество равных шагов.Он вращается пошагово, а не непрерывно. Они используются для точного позиционирования с помощью управляющего сигнала.
Электрическая машина
Этот тип символа используется для таких машин, которые могут использоваться как двигатель, так и генератор. Двигатель преобразует электрическую энергию в механическую, а генератор — наоборот.
Двигатель постоянного тока с постоянным магнитом
В бесщеточных двигателях постоянного тока такого типа для создания полюсов вместо обмоток возбуждения используется постоянный магнит.Символ выше представляет двигатель постоянного тока со значком магнита, обозначающим тип постоянного магнита.
Однофазный двигатель переменного тока серии
Этот символ обозначает однофазный двигатель переменного тока. Он работает от однофазного источника переменного тока, и его обмотка возбуждения включена последовательно с обмоткой якоря. Он также известен как модифицированный двигатель постоянного тока.
Двигатель постоянного тока
Двигатель постоянного тока, обмотка возбуждения которого соединена последовательно с обмоткой якоря, называется двигателем постоянного тока и на схематических изображениях обозначается этим символом.
Однофазный асинхронный двигательпеременного тока с выведенными клеммами обмотки
Он также известен как асинхронный двигатель с расщепленной фазой. Этот тип однофазного двигателя переменного тока имеет доступную отдельную обмотку, известную как пусковая обмотка с высоким сопротивлением. Пусковая обмотка используется для запуска двигателя.
Однофазный отталкивающий двигатель
Это однофазный двигатель переменного тока, работающий по принципу отталкивания между магнитным полем статора и ротора.Магнитное поле ротора создается индуцированным током и может вращаться, вращая щетки вдоль своей оси. Это вращающееся магнитное поле используется для изменения направления двигателя.
Параллельный двигатель постоянного тока
Это обозначение, используемое для параллельного двигателя постоянного тока, обмотка возбуждения которого подключена параллельно обмотке якоря. Обе обмотки подключены к общему источнику постоянного тока.
Однофазный синхронный двигатель
Этот символ обозначает однофазный синхронный двигатель переменного тока.Синхронные двигатели сначала запускаются как асинхронные, но позже достигают синхронной скорости, которая зависит только от входной частоты питания.
Двигатель постоянного тока с комбинированным возбуждением
Такой тип двигателя постоянного тока имеет как последовательную обмотку возбуждения, так и шунтирующую (или параллельную) обмотку возбуждения. Обмотка шунтирующего поля усиливает магнитное поле, создаваемое последовательной обмоткой. он имеет преимущества как двигателей постоянного тока с последовательной обмоткой, так и двигателей постоянного тока с параллельной обмоткой, то есть высокий пусковой момент и регулирование скорости.
Трехфазный двигатель переменного тока
Это общий символ, используемый для трехфазного двигателя переменного тока. Трехфазный источник переменного тока создает вращающееся магнитное поле, которое реагирует с магнитным полем, создаваемым ротором, таким образом вращая ротор.
Трехфазный электродвигатель в форме звезды
Это трехфазный двигатель, обмотки которого соединены вместе по схеме звезды или звезды. этот символ также представляет функцию автоматического запуска двигателя.
Трехфазный двигатель с фазным ротором
Этот символ представляет трехфазный двигатель с фазным ротором. Это тип трехфазного двигателя переменного тока, ротор которого связан с внешним сопротивлением через контактные кольца. Преимущество двигателя с фазным ротором заключается в том, что он генерирует высокий пусковой момент при меньшем токе.
Трехфазный линейный двигатель
Этот символ обозначает линейный двигатель, который работает от трехфазного источника питания переменного тока.