Линейные прямые приводы – это самые высокие рабочие характеристики для машиностроения
07.06.2017
От нуля до 100 км/ч за 2,5 секунды – это эксплуатационные характеристики болида Формулы 1, демонстрирующее ускорение 1,13g. Данные значения вызовут лишь усталую улыбку на лице пользователя прямого привода. Значения ускорения до 10g уже давно являются для них реальными, сопоставимыми со стартом от нуля до 100 км/ч всего за 0,3 секунды.
Где необходимо такое ускорение?
Линейные прямые приводы можно обнаружить как в устройствах сборки и перемещения, так и в автоматике. Стандартными устройствами являются контрольно-измерительные и испытательные машины, подъемно-транспортные системы, закройное и сборочное оборудование, установки для монтажа кристалла, а также установки для испытаний и упаковочные установки в серверной области полупроводниковой отрасли.
Как работает линейный прямой привод?
В принципе, линейный прямой привод работает как постоянно включенный бесщёточный поворотный сервопривод.
|
German/Немецкий |
English/Английский |
Russian/Русский |
|
Stator |
stator |
статор |
|
Rotor |
rotor |
ротор |
|
Magnete |
magnets |
магниты |
|
Wicklung |
winding |
обмотка |
|
Primärteil (Spulensystem) |
primary section (coil system) |
первичная секция (система катушек) |
|
Sekundärteil (Magnetbahn) |
secondary section (magnetic track) |
вторичная секция (магнитная дорожка) |
|
Luftspalt |
Air gap |
Воздушная прослойка |
Линейные прямые приводы состоят и зпервичной секции(системыкатушек) и вторичной секции (магнитной дорожки). Первичная секция является частью соответствующей механической конструкции, и обычно соединяется с подвижной кареткой или пультом. Питание, подаваемое на систему катушек, генерирует силу электромагнитного поля в отношении стационарной вторичной секции (магнитной дорожки), которая приводит в движение первичную секцию. Соответствующая направляющая система обеспечивает надлежащую воздушную прослойку между первичной и вторичной секциями. Для работы двигателя также необходима система измерения, соединенная с подвижной осью. На рисунке ниже показаны соответствующие компоненты в разобранном виде.
Первичная секция является частью соответствующей механической конструкции, и обычно соединяется с подвижной кареткой или пультом. Питание, подаваемое на систему катушек, генерирует силу электромагнитного поля в отношении стационарной вторичной секции (магнитной дорожки), которая приводит в движение первичную секцию. Соответствующая направляющая система обеспечивает надлежащую воздушную прослойку между первичной и вторичной секциями. Для работы двигателя также необходима система измерения, соединенная с подвижной осью. На рисунке ниже показаны соответствующие компоненты в разобранном виде.
|
German/Немецкий |
English/Английский |
Russian/Русский |
|
Linearführung |
Linear guides |
Линейные направляющие |
|
Schleppkette |
Mobile cable handler |
Передвижное устройство подачи кабеля |
|
Wagen Profil |
Carriage profile |
Профиль каретки |
|
Kundenspezifischer Tisch |
Customer specific table |
Специфический для клиента пульт |
|
Motor Tisch |
Motor table |
Пульт двигателя |
|
Linearmaßstab |
Linear scale |
Линейная шкала |
|
Aluminium Profil |
Aluminum profile |
Алюминиевый профиль |
|
Primärteil (Spulensystem) |
primary section (coil system) |
первичная секция (система катушек) |
|
Sensorkopf |
Sensor head |
Головка датчика |
|
Lager |
bearing |
Подшипник |
|
Sekundärteil (Magnetbahn) |
secondary section (magnetic track) |
вторичная секция (магнитная дорожка) |
Структура и размещение линейных прямых приводов
Электрические линейные двигатели применяются во многих областях. На практике, линейные прямые приводы выпускаются в трех различных вариантах исполнения, которые будут более подробно описаны ниже.
На практике, линейные прямые приводы выпускаются в трех различных вариантах исполнения, которые будут более подробно описаны ниже.
Двигатель с воздушным сердечником тип-G
Прямые приводы с воздушным сердечником серии SGLGWот компании «Yaskawa» предлагают максимальные динамические характеристики при минимальном размере узла. Пики силы данных систем составляют от 40 до 3000 Ньютонов. Ввиду своей конструкции, не содержащей железа, такие линейные двигатели не имеют магнитного притяжения, что ведет к увеличению срока службы линейных направляющих и подшипников, уменьшению шума и хорошим характеристикам синхронизации. Поскольку, габариты двигателей невелики, и они занимают мало места, их можно устанавливать в малогабаритные машины. Стандартными областями применения линейных двигателей с воздушным сердечником являются серверная область полупроводниковой отрасли, а также производство жидкокристаллических индикаторов и индикаторных панелей.
Двигатели со стальным сердечником тип-F
При использовании линейных двигателей со стальным сердечником серии SGLFW, необходимо учитывать магнитное притяжение между корпусом катушки и магнитной дорожкой.
Двигатели со стальным сердечником тип-T
Стальной сердечник серии SGLTWот компании «Yaskawa» не имеет аналогов на рынке. Двигатели данной серии могут генерировать пики силы до 7500 Ньютонов.
Примеры установки
Обычно, линейный прямой привод можно установить двумя способами.
Каркас катушки перемещается по магнитной дорожке
Таблица перевода для следующих пяти иллюстраций:
|
German/Немецкий |
English/Английский |
Russian/Русский |
|
Spule |
coil |
катушка |
|
Magnetbahn |
magnetic track |
магнитная дорожка |
|
Magnet |
magnet |
магнит |
Это самая обычная инсталляционная схема размещения.
Магнит перемещается по катушке
Данная схема демонстрирует перемещение магнита по катушке. В большинстве случаев, такая конструкция применяется в традиционных решениях, требующих максимальных динамических характеристик и короткого полного хода. Поскольку катушка неподвижна, кабель питания и кабель для подключения энкодера также стационарные, следовательно, передвижное устройство подачи кабеля не требуется.
В некоторых устройствах, также может использоваться стандартный двигатель со стальным сердечником в перевернутой конфигурации. В этом случае, необходимо позаботиться об ограничении полного хода и убедиться, что вес магнита меньше веса катушки. Полный ход обычно ограничен длиной катушки, таким образом, вес остается на допустимых уровнях.
Полный ход обычно ограничен длиной катушки, таким образом, вес остается на допустимых уровнях.
Два каркаса катушки перемещаются по одной магнитной дорожке
Линейные прямые приводы очень хорошо подходят для устройств с несколькими пультами, в которых два или более каркаса катушки должны независимо перемещаться по одной магнитной дорожке.
Еще одной возможностью является параллельная работа двух катушек на одной магнитной дорожке для увеличенного максимального усилия. Обычным примером для такой конфигурации является цифровая печатная машина шириной 5м, в которой печатная головка весом 120 кг перемещается со скоростью 3 м/сиускорениемдо9,5 м/с2.
Установщик ИС с платформой
|
German/Немецкий |
English/Английский |
Russian/Русский |
|
Nur 2 Linearführungen nötig |
Only 2 linear guides required |
Необходимы только 2 линейные направляющие |
|
2 x SGLFW Linearmotor |
2 x SGLFW linear motors |
2 х линейных двигателя SGLFW |
|
Sensorkopf |
sensor head |
головка датчика |
|
SGLTW Linearmotor |
SGLTW linear motor |
линейный двигатель SGLTW |
Вышеприведенное изображение показывает общую конструкцию установщика ИС, который использует два линейных двигателя SGLTWдля платформы (ось Y) и два линейных двигателя SGLFWдля независимой работы на магнитной дорожке (ось Х).
Преимущества над классическими линейными системами
Классические линейные системы питаются от ротационных серводвигателей. Переход от вращательного движения к линейному достигается при помощи зубчатой передачи, зубчатой рейки, ремня или реверсивного шарикового винта, дающих возможность подключения широкого спектра приборов. Такие системы, однако, по нарастающей достигают своих технических пределов относительно динамических характеристик и точности. Поскольку электрические линейные двигатели создают прямое линейное перемещение, они не требуют зубчатых передач, валиков и шестеренок, зубчатых реек и конических зубчатых передач или ремней и роликов. Удаление этих компонентов исключает истирание, деформацию и наличие люфта, и дает очень высокую точность позиционирования, а также отличные динамические характеристики, низкий уровень шума, требует минимального обслуживания и, следовательно, имеет высокую готовность. Усилие передается напрямую, без каких-либо потерь. При сравнении затрат при полном сроке эксплуатации, линейные прямые передачи предлагают самые лучшее рабочие параметры. Дополнительными преимуществами являются независимая работа двух или более каркасов катушки на одной магнитной дорожке, параллельная работа двух каркасов катушки для увеличения эффективности или максимального усилия, и простое расширение полного хода путем добавления большего числа магнитов.
Дополнительными преимуществами являются независимая работа двух или более каркасов катушки на одной магнитной дорожке, параллельная работа двух каркасов катушки для увеличения эффективности или максимального усилия, и простое расширение полного хода путем добавления большего числа магнитов.
Качество всей системы имеет большое значение
Идеальная приводная система состоит из мощного контроллера движения, программируемого сервоусилителя, линейного прямого привода, линейной шкалы высокого разрешения и оптимальной механики. Высокодинамичные системы дополнительно требуют очень жестких и прочных механической конструкции и направляющих. Максимальная скорость до 10 м/с, ускорение приблизительно 10gи точность размещения менее 1мкм могут быть достигнуты только, если все компоненты системы оптимально подходят друг другу. Компания «Yaskawa» имеет более 15 лет опыта работы с линейными прямыми приводами, и является лидером в данной технологии на мировом рынке.
Сотрудничество
Установка линейных двигателей на машину требует особой технологии. Именно поэтому, сотрудничество создателя машины и производителя привода, с самого начала проекта разработки, имеет большое значение при создании оптимальной приводной системы для особых условий. Компания «Yaskawa» оказывает поддержку своим покупателям на протяжении всего срока службы машины.
Именно поэтому, сотрудничество создателя машины и производителя привода, с самого начала проекта разработки, имеет большое значение при создании оптимальной приводной системы для особых условий. Компания «Yaskawa» оказывает поддержку своим покупателям на протяжении всего срока службы машины.
Возникли вопросы?
Заполните форму обратной связи, наши менеджеры свяжутся с вами!
Задать вопрос
Возврат к списку
Поделиться:Ременный или прямой привод компрессора
Техника и системы автоматизации — ООО ТСА
Комплексные поставки систем автоматизации
Наш адрес:
г. Пенза, ул. Германа Титова, 18
Режим работы:
пн-пт 9:00 — 18:00
сб-вс выходной
24.02.2023
Компрессор – это важнейшее оборудование во многих производственных процессах. Он используется для сжатия и накачивания воздуха. Выбор привода в нем имеет значительное влияние на эффективность и эксплуатационные расходы. В основном существуют два типа: ременный и прямой. Следует рассмотреть основные отличия между ними, плюсы и минусы, характеристики, которые нужно учитывать при выборе агрегата.
В основном существуют два типа: ременный и прямой. Следует рассмотреть основные отличия между ними, плюсы и минусы, характеристики, которые нужно учитывать при выборе агрегата.
Ременный привод
Это самый распространенный тип устройства, который используется для передачи мощности с двигателя на компрессорный блок с помощью ремня. Ввиду простоты конструкции он является дешевым и легким в монтаже, а также имеет меньшую интенсивность траты энергии по сравнению с прямым приводом. Кроме того, система проста в установке и обслуживании, а также имеет низкую цену из-за особенностей конструкции.
Однако имеются некоторые недостатки, такие как высокий уровень шума и ухудшение надежности, так как соединительный элемент может истончиться или сломаться. Кроме того, в некоторых ситуациях он вызывает неравномерность давления воздуха, что довольно сильно влияет на качество работы оборудования.
Среди преимуществ стоит выделить следующие:
- малые затраты на электроэнергию;
- небольшое увеличение температуры при работе;
- отличная производительность;
- низкие затраты на обслуживание;
- простая конструкция, которая позволяет сократить количество деталей, необходимых для установки и управления системой.


Минусы:
- зависимость от качества ремней и их износа;
- ограниченная точность управления;
- повышенный шум;
Прямой привод
Двигатель и компрессорный блок непосредственно соединены друг с другом. Это позволяет уменьшить шум и улучшить долговечность компрессорного устройства, так как нет риска поломки соединяющего элемента. Преимуществом является высокая эффективность и создание более равномерного давления воздуха, что важно для качественной работы технического устройства. Непосредственное соединение деталей позволяет исключить потерю мощности.
Кроме того, механизм прямого привода обеспечивает надежность, так как исключается шанс поломки ремня. Однако этот вариант дороже и зачастую требует больше места для монтажа.
Среди достоинств следует выделить:
- точность управления;
- меньший уровень шума;
- длительный срок службы;
- низкий износ;
- легкость установки и управления системой.
Какой компрессор выбрать
В первую очередь выбор должен зависеть от следующих критериев:
- мощность – более высокую мощность обеспечивают компрессоры с прямым приводом;
- надежность – если требуется компрессорное оборудование, которое будет функционировать без перебоев, то лучше всего подойдет агрегат с прямым приводом;
- принцип использования – если планируется размещать оборудование в условиях с высокой влажностью или пылью, то механизм на ремне больше подойдет, так как он менее чувствителен к внешним факторам.

Выбирать нужно, отталкиваясь от индивидуальных потребностей и предпочтений. Немаловажное значение имеет ряд моментов: цель использования, требования к бюджету, технические факторы. В зависимости от стратегии использования каждый имеет возможность подобрать наиболее удобный для себя вариант.
г. Пенза, ул. Германа Титова, 18
+7 (927) 289-36-95
2018 © Все права
защищены
Наш адрес:
г. Пенза, ул. Германа Титова, 18
Создание сайта — Веб-студия Три Дабл Ю
Direct Drive — Руководство для инженера
Direct Drive пережил возрождение осведомленности и новых приложений за последние 20 лет. Прямой привод вала на самом деле не является чем-то новым, и его практикуют уже более 100 лет. Что изменилось, так это типы двигателей, используемых для приложения, и типы доступных контроллеров двигателей.
Наиболее широко используемый тип двигателя для прямого привода, как правило, представляет собой синхронный двигатель с постоянными магнитами с большим числом полюсов (также известный как бесщеточный двигатель постоянного тока), который имеет большой диаметр и короткую осевую длину. Его магнитно-механическая конфигурация обеспечивает высокий крутящий момент и высокое отношение частоты электрического привода к механической скорости. Многие из этих двигателей также имеют большое сквозное отверстие для подачи проводов и оптики через центр сборки. Контроллеры двигателей с высокой вычислительной мощностью могут управлять двигателями вплоть до нулевой скорости с полным выходным крутящим моментом, а также управлять крутящим моментом в широком диапазоне скоростей наряду с профилями ускорения и скорости. При правильной электрической конфигурации и схеме управления приложения с прямым приводом могут работать на высоких скоростях, превышающих 50 об/мин (например, шпиндель станка с прямым приводом), или на низких скоростях, близких к нулю (например, система подвеса спутникового слежения).
Его магнитно-механическая конфигурация обеспечивает высокий крутящий момент и высокое отношение частоты электрического привода к механической скорости. Многие из этих двигателей также имеют большое сквозное отверстие для подачи проводов и оптики через центр сборки. Контроллеры двигателей с высокой вычислительной мощностью могут управлять двигателями вплоть до нулевой скорости с полным выходным крутящим моментом, а также управлять крутящим моментом в широком диапазоне скоростей наряду с профилями ускорения и скорости. При правильной электрической конфигурации и схеме управления приложения с прямым приводом могут работать на высоких скоростях, превышающих 50 об/мин (например, шпиндель станка с прямым приводом), или на низких скоростях, близких к нулю (например, система подвеса спутникового слежения).
ДВИГАТЕЛИ С ПРЯМЫМ ПРИВОДОМ
Хотя многие поставщики рекламируют свои «двигатели с прямым приводом», прямой привод — это не тип двигателя, а способ подключения двигателя к нагрузке. Это также означает, что диапазон скорости и крутящего момента можно использовать без какой-либо коробки передач или редуктора скорости. За прошедшие годы были приняты торговые названия и фразы, которые подразумевают, что функция также является формой, что просто неверно. Другими знакомыми терминами, подобными этому, являются серводвигатель переменного тока, шаговый двигатель и серводвигатель. Все эти термины относятся к тому, как двигатель используется или управляется, и ни один из них не раскрывает ничего правдивого о двигателе.
Это также означает, что диапазон скорости и крутящего момента можно использовать без какой-либо коробки передач или редуктора скорости. За прошедшие годы были приняты торговые названия и фразы, которые подразумевают, что функция также является формой, что просто неверно. Другими знакомыми терминами, подобными этому, являются серводвигатель переменного тока, шаговый двигатель и серводвигатель. Все эти термины относятся к тому, как двигатель используется или управляется, и ни один из них не раскрывает ничего правдивого о двигателе.
ТИПЫ ДВИГАТЕЛЕЙ
Точное определение двигателя связано с его механизмом создания крутящего момента или силы, а также с тем, сколько у него электромагнитных фаз и как они управляются/коммутируются. Электромагнитный (ЭМ) крутящий момент/сила возникает в результате взаимодействия между двумя магнитными полями или за счет изменения сопротивления или перманентной проводимости в зависимости от положения/угла (или некоторой комбинации этих двух основных групп).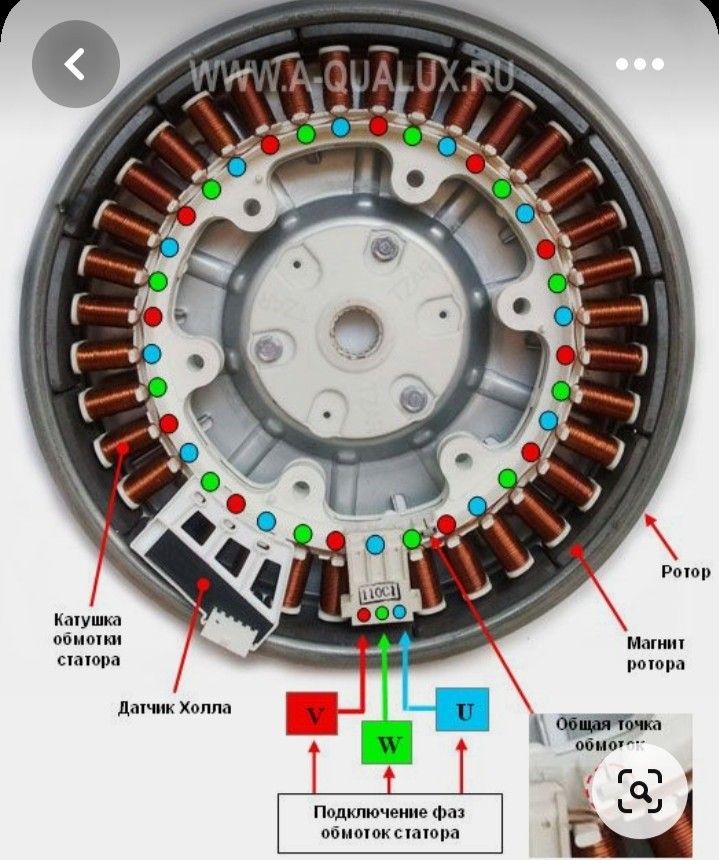 Сегодня используются четыре основных типа электромагнитных двигателей; двигатели постоянного или переменного тока с щеточной коммутацией, синхронные двигатели с постоянными магнитами с электронной коммутацией (также известные как бесщеточные двигатели постоянного тока), асинхронные двигатели переменного тока (также известные как асинхронные) и электронно-коммутируемые переменные сопротивления (также известные как переключаемые сопротивления). Конечно, также используются гибридные комбинации этих технологий. Не существует никаких новых форм генерации крутящего момента ЭМ, несмотря на то, что вы можете прочитать в Интернете.
Сегодня используются четыре основных типа электромагнитных двигателей; двигатели постоянного или переменного тока с щеточной коммутацией, синхронные двигатели с постоянными магнитами с электронной коммутацией (также известные как бесщеточные двигатели постоянного тока), асинхронные двигатели переменного тока (также известные как асинхронные) и электронно-коммутируемые переменные сопротивления (также известные как переключаемые сопротивления). Конечно, также используются гибридные комбинации этих технологий. Не существует никаких новых форм генерации крутящего момента ЭМ, несмотря на то, что вы можете прочитать в Интернете.
Любой из перечисленных выше типов двигателей можно настроить/оптимизировать и управлять им для приложения с прямым приводом. Поскольку прямой привод существует уже много лет, это действительно прямой привод, оптимизированный для низких скоростей, что является новым вариантом. Это случай, когда скорость низкая, а требуемый крутящий момент высок. Система может вообще не двигаться, а просто удерживаться с прямым управлением крутящим моментом. Именно здесь вступает в игру соотношение частоты электрического привода и механической скорости (также известное как передаточное число электромагнитной передачи). Входная электрическая частота — это скорость, с которой ток изменяется в фазах двигателя, когда двигатель коммутируется (либо механически, как в коллекторном двигателе с коммутатором, либо электрически через контроллер и датчик положения). Выходная механическая скорость напрямую связана с частотой электрического привода и количеством полюсов двигателя. Эффективность двигателя определяется исключительно электрической частотой и не связана с механической скоростью вращения (при условии, что вы пренебрегаете трением в подшипниках и другими потерями, которые обычно очень малы). Двигатель с большим числом полюсов достигает своего пикового КПД при более низкой механической скорости вращения, чем двигатель с малым числом полюсов.
Именно здесь вступает в игру соотношение частоты электрического привода и механической скорости (также известное как передаточное число электромагнитной передачи). Входная электрическая частота — это скорость, с которой ток изменяется в фазах двигателя, когда двигатель коммутируется (либо механически, как в коллекторном двигателе с коммутатором, либо электрически через контроллер и датчик положения). Выходная механическая скорость напрямую связана с частотой электрического привода и количеством полюсов двигателя. Эффективность двигателя определяется исключительно электрической частотой и не связана с механической скоростью вращения (при условии, что вы пренебрегаете трением в подшипниках и другими потерями, которые обычно очень малы). Двигатель с большим числом полюсов достигает своего пикового КПД при более низкой механической скорости вращения, чем двигатель с малым числом полюсов.
В заключение, не существует такого понятия, как двигатель с прямым приводом, есть только двигатель, который используется или может быть оптимизирован для использования в приложениях с прямым приводом. Прямой привод — это вещь, двигатель с прямым приводом — не вещь. На самом деле, во многих случаях двигатель, который обычно оптимизирован для прямого привода, соединяется с прецизионным редуктором, в результате чего получается очень компактный мотор-редуктор с более низким осевым профилем.
Прямой привод — это вещь, двигатель с прямым приводом — не вещь. На самом деле, во многих случаях двигатель, который обычно оптимизирован для прямого привода, соединяется с прецизионным редуктором, в результате чего получается очень компактный мотор-редуктор с более низким осевым профилем.
Сеть переменного тока
Сеть переменного тока имеет одну рабочую частоту, 60 Гц (или 50 Гц во многих частях мира). Асинхронные двигатели переменного тока (также известные как асинхронные двигатели) работают непосредственно от сети переменного тока. Самый распространенный асинхронный двигатель переменного тока сегодня работает с теоретической скоростью 1800 об/мин и фактической 1750 об/мин при приложении номинальной крутящей нагрузки. Эта скорость достаточно хороша для эффективности и обеспечивает хорошее соотношение между размером и рейтингом HP. Фиксированная скорость для легкого расчета мощности. Стандарт лошадиных сил был установлен в США для определения размеров рамы двигателя и был индикатором выходного крутящего момента. Крутящий момент, умноженный на скорость (в правильных единицах), дает мощность. Двигатель мощностью 1 л.с. развивает крутящий момент 36 фунт-дюйм при 1750 об/мин, двигатель мощностью 2 л.с. развивает крутящий момент 72 фунт-дюйм. Все это прекрасно работает до тех пор, пока на сцене не появится переменная скорость, но об этом позже. Конечно, остальной мир использовал ватты, 746 из которых равняются 1 л.с.
Крутящий момент, умноженный на скорость (в правильных единицах), дает мощность. Двигатель мощностью 1 л.с. развивает крутящий момент 36 фунт-дюйм при 1750 об/мин, двигатель мощностью 2 л.с. развивает крутящий момент 72 фунт-дюйм. Все это прекрасно работает до тех пор, пока на сцене не появится переменная скорость, но об этом позже. Конечно, остальной мир использовал ватты, 746 из которых равняются 1 л.с.
Насосные системы и редукторы скорости
Для насосных систем скорость 1700-1800 об/мин является хорошей скоростью с точки зрения мощности, размера и эффективности, и сегодня преобладают насосы с такой скоростью, т. е. насос для бассейна или любые бытовые системы ОВКВ и насосные системы. для колодцев и водоотведения. К сожалению, во время начальной промышленной революции 1800 об/мин были слишком высокими для большинства механических устройств на заводе, и требовалось снижение скорости. Практические скорости, такие как 50-250 об/мин для больших машин и диапазоны от 10 до 1000 об/мин, были типичны для многих различных применений.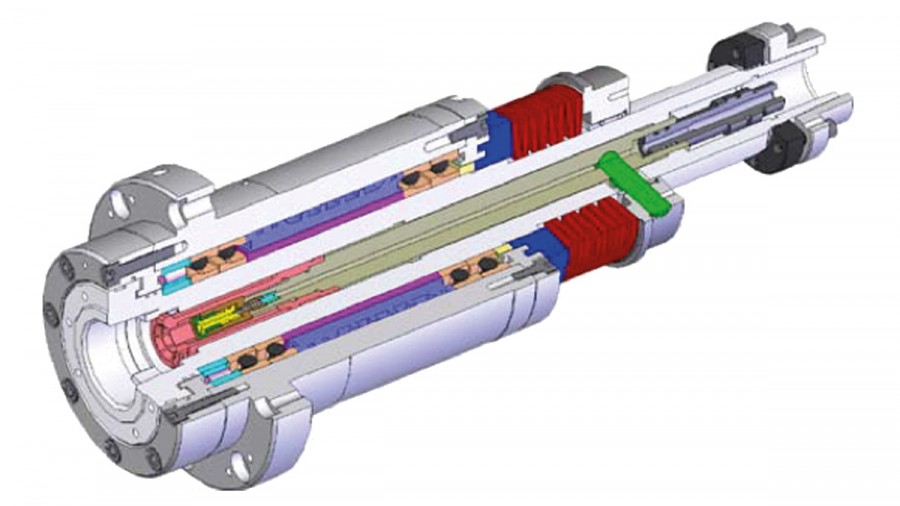 Снижение скорости может иметь форму системы ремня и шкива или механического редуктора (с более высоким передаточным числом).
Снижение скорости может иметь форму системы ремня и шкива или механического редуктора (с более высоким передаточным числом).
Редукторы скорости дали очень положительный вторичный результат, они также умножили выходной крутящий момент, как правило, пропорционально передаточному отношению. Если вам нужно 170-180 об/мин, вы можете использовать редуктор 10:1, дополнительным преимуществом будет 10-кратное увеличение крутящего момента за вычетом потерь эффективности в системе передач. Внезапно клиенты могут получить все различные выходные скорости и увеличение крутящего момента. Вещи нельзя было изменить на лету, но с помощью ременных систем и шкивов скорость можно было варьировать для разных нужд. Рассмотрим фрезерный станок или токарный станок середины 19 века.00 с регулировкой скорости с помощью шкивов и замены ремня. Система снижения скорости на самом деле является формой преобразования мощности в обмен скорости на крутящий момент при сохранении той же выходной мощности (конечно, за вычетом эффективности). Механические формы снижения скорости и увеличения крутящего момента стали основой технологической революции. Это все произошло потому, что источник питания имел фиксированную частоту.
Механические формы снижения скорости и увеличения крутящего момента стали основой технологической революции. Это все произошло потому, что источник питания имел фиксированную частоту.
Микропроцессоры и транзисторы
Микропроцессоры и транзисторы снова изменили ход истории в середине 19 века.00-х. Заводские требования к конфигурациям настройки и переключениям начали требовать переменной скорости или регулируемой скорости нажатием кнопки вместо переключения ремня или редуктора скорости. На сцену вышли драйверы двигателей, которые могли преобразовывать мощность переменного тока в постоянный, а затем воссоздавать мощность переменного тока на разных частотах. Они использовали микроконтроллер/микропроцессоры для переключения транзисторов и управления напряжением, током и частотой. Внезапно асинхронные двигатели переменного тока могли работать на разных скоростях на основе драйвера двигателя, который первоначально назывался инвертором из-за его функции создания переменного тока из постоянного.
Между тем, двигатели постоянного тока (щеточного типа) уже могли работать с разными скоростями в 1800-х годах. Если бы мощность постоянного тока можно было локализовать на заводах, двигатели постоянного тока могли бы работать на всех скоростях. Конечно, редуктор для увеличения крутящего момента по-прежнему позволял бы использовать гораздо меньшие двигатели для приложений с более низкой скоростью, когда требуемый крутящий момент был высоким, а скорость низкой.
Война с токами
Ирония в том, что постоянный ток с самого начала обеспечивал лучшее освещение и переменную скорость с самого начала. В то же время, когда шла «Война с токами», происходило рождение автомобиля. Более 50% первых моторизованных багги приводились в действие двигателями постоянного тока и батареями. Когда постоянный ток перестал использоваться в качестве источника питания, а развитие аккумуляторных технологий было недостаточно быстрым, переменный ток стал стандартом, и до недавнего времени преобладал двигатель внутреннего сгорания. Спустя 120 лет мир снова совершил полный круг, когда электромобили снова работают от аккумуляторов. В некоторых электромобилях даже используются асинхронные двигатели переменного тока с инверторами, но в большинстве из них используется тип синхронного двигателя, который сочетает в себе создание крутящего момента с постоянным магнитом и переменным реактивным сопротивлением, обеспечивая наивысший общий КПД в широком диапазоне скоростей.
Спустя 120 лет мир снова совершил полный круг, когда электромобили снова работают от аккумуляторов. В некоторых электромобилях даже используются асинхронные двигатели переменного тока с инверторами, но в большинстве из них используется тип синхронного двигателя, который сочетает в себе создание крутящего момента с постоянным магнитом и переменным реактивным сопротивлением, обеспечивая наивысший общий КПД в широком диапазоне скоростей.
Лампочки постоянного тока
Мир также перешел на светодиодное освещение, которое по своей сути является технологией ламп постоянного тока. Эта технология освещения значительно эффективнее и потребляет меньше электроэнергии. Солнечные панели производят постоянный ток, а батареи используются для хранения энергии, создаваемой всеми возобновляемыми источниками. Большинство современных генераторов производят постоянное напряжение, которое, в свою очередь, необходимо преобразовать обратно в переменное для подачи в сеть.
Вполне возможно, что правильным ответом в конце 1800-х годов было использование передачи энергии переменного тока для обеспечения безопасности и покрытия больших расстояний, а также использование технологии постоянного тока для лампочек и локального заводского движения с переменной скоростью, а также для выработки электроэнергии с помощью постоянного тока.
ПРЕИМУЩЕСТВА ПРЯМОГО ПРИВОДА
Прямой привод имеет несколько преимуществ при использовании в системах точного перемещения. Все трансмиссии, за небольшим исключением, имеют потери КПД, люфты и механический износ, ограничивающий срок службы. Надежность двигательной системы обратно пропорциональна количеству механических элементов, находящихся в контакте. Добавление редуктора/редуктора может увеличить крутящий момент, но в конечном итоге является фактором, ограничивающим срок службы.
Прямой привод требует гораздо более интеллектуальной системы управления с более широкой полосой пропускания в приложениях, где нагрузка и инерция изменяются в зависимости от положения, например, в манипуляторе робота. Системы управления с новейшими технологиями DSP и микроконтроллеров гораздо более способны к новым, более сложным методам управления с обработкой чисел. Они могут вычислять полную модель системы движения каждые несколько микросекунд. Это уменьшает основные изменения инерции обработки в зависимости от положения. Зубчатая передача может помочь в этом, уменьшая отраженную инерцию сервосистемы на квадрат передаточного отношения, но обычно приводит к люфту, более высоким фиктивным характеристикам, более низкой эффективности и сокращению срока службы.
Зубчатая передача может помочь в этом, уменьшая отраженную инерцию сервосистемы на квадрат передаточного отношения, но обычно приводит к люфту, более высоким фиктивным характеристикам, более низкой эффективности и сокращению срока службы.
Зубчатая передача может увеличивать крутящий момент и уменьшать отраженную инерцию двигателя, что обычно является хорошей вещью в автоматизации производства, если вам не нужны высокие скорости. Однако есть несколько очень сложных обстоятельств, которые возникают, когда система с высокой передачей сталкивается с механическим упором. Все преимущества низкой отражательной инерции быстро возвращаются к потенциальному повреждению механических частей из-за накопленной кинетической энергии. Это очень верно в мире коллаборативных роботов. Соединения роботов с большим количеством передач обычно делают маленькими. Есть несколько зубчатых передач с нулевым люфтом, позволяющих это сделать (хотя они служат в лучшем случае 10 000 часов). Если коллаборативный робот сталкивается с человеком и ему необходимо остановиться в целях безопасности, наличие шестерни с высоким передаточным числом может ограничить его способность быть безопасным. Прямой привод является наиболее предпочтительным подходом к коллаборативным роботам, потому что в нем нет умножения крутящего момента, а остановка так же проста, как движение.
Прямой привод является наиболее предпочтительным подходом к коллаборативным роботам, потому что в нем нет умножения крутящего момента, а остановка так же проста, как движение.
Для высокоскоростных систем, таких как шпиндели, распространен прямой привод. В данном случае требуется не большой крутящий момент, а достаточно высокая скорость. В некоторых случаях до 100 000 об/мин. Асинхронные двигатели переменного тока подходят для этого применения, если система управления может правильно управлять двигателем на этих скоростях в диапазоне ослабления поля.
Что такое прямой привод в контексте приложений движения?
Вы здесь: Домашняя страница / Часто задаваемые вопросы + основы / Что такое прямой привод в контексте приложений движения?
By Danielle Collins Оставить комментарий
Система прямого привода позволяет прикреплять нагрузку непосредственно к двигателю.Изображение предоставлено: Celera Motion
В наиболее распространенных системах с моторным приводом двигатель соединен с грузом, перемещаемым элементом механической передачи — ремнем, цепью, зубчатой рейкой, шариковым или ходовым винтом или даже просто коробка передач. Но некоторые системы линейного и вращательного движения избавляются от элементов механической передачи и подключают нагрузку непосредственно к двигателю. Они называются системами прямого привода.
Но некоторые системы линейного и вращательного движения избавляются от элементов механической передачи и подключают нагрузку непосредственно к двигателю. Они называются системами прямого привода.
Существует несколько типов линейных и поворотных систем прямого привода, от линейных двигателей и моментных двигателей до звуковых катушек и некоторых конструкций пьезодвигателей. Линейные двигатели и моментные двигатели, возможно, являются наиболее распространенными типами, которые используются во всем, от упаковочного и сборочного оборудования до станков и шестиосевых роботов, где ключевыми преимуществами являются высокое ускорение и компактный форм-фактор. Для нанопозиционирования или колебательных приложений с малым ходом принцип прямого привода двигателей со звуковой катушкой и некоторых конструкций пьезодвигателей, таких как изгибные и ультразвуковые версии, означает чрезвычайно высокую жесткость и превосходную точность позиционирования.
В дополнение к преимуществам, присущим каждой конкретной технологии, все системы прямого привода имеют несколько общих характеристик. Во-первых, устранение механических компонентов трансмиссии означает отсутствие люфта, закручивания или податливости в системе, поэтому жесткость значительно повышается. А лучшая жесткость означает повышенную точность позиционирования и повторяемость, а также снижение резонанса, поэтому элементы управления сервоприводом можно настраивать с более высоким коэффициентом усиления. Системы с прямым приводом также могут выдерживать более высокие отношения инерции нагрузки к двигателю без ущерба для способности двигателя управлять нагрузкой.
Во-первых, устранение механических компонентов трансмиссии означает отсутствие люфта, закручивания или податливости в системе, поэтому жесткость значительно повышается. А лучшая жесткость означает повышенную точность позиционирования и повторяемость, а также снижение резонанса, поэтому элементы управления сервоприводом можно настраивать с более высоким коэффициентом усиления. Системы с прямым приводом также могут выдерживать более высокие отношения инерции нагрузки к двигателю без ущерба для способности двигателя управлять нагрузкой.
Изображение предоставлено: ETEL S.A.
Системы с прямым приводом также выигрывают от более низкого трения, чем системы, в которых используются компоненты механической трансмиссии, поэтому требования к крутящему моменту или силе ниже. Также снижается тепловыделение, что означает, что между двигателем и нагрузкой теряется меньше энергии, что повышает эффективность системы.
Хотя трение обычно рассматривается как нежелательный эффект относительного движения двух компонентов, уменьшенное трение, присущее прямым приводам, в некоторых случаях может быть недостатком. Например, при прямом приводе очень мало сопротивления обратному движению, поэтому линейная система прямого привода, используемая в вертикальном приложении, потребует внешнего тормоза или других мер, таких как противовес, для предотвращения падения груза при отключении питания. потерянный.
Трение и податливость, присущие компонентам механической трансмиссии, также могут обеспечивать демпфирование вибраций и колебаний, тогда как системы прямого привода обычно обеспечивают меньшее демпфирование этих эффектов, что может означать увеличение времени установления.
Моментные двигатели часто используются в робототехнике.
Изображение предоставлено TorqueTec GmbH
Преимущество отказа от механических компонентов трансмиссии состоит в снижении инерции системы. В некоторых приложениях — например, там, где большие усилия тяги требуют привода с шарико-винтовой передачей большого диаметра — меньшая инерция позволяет использовать двигатель меньшего размера. А система с более низкой инерцией может ускоряться и замедляться быстрее, что упрощает достижение высокодинамичных перемещений и более быстрых остановок, что может быть особенно полезно, когда нагрузка может представлять опасность для другого оборудования или персонала.
В некоторых приложениях — например, там, где большие усилия тяги требуют привода с шарико-винтовой передачей большого диаметра — меньшая инерция позволяет использовать двигатель меньшего размера. А система с более низкой инерцией может ускоряться и замедляться быстрее, что упрощает достижение высокодинамичных перемещений и более быстрых остановок, что может быть особенно полезно, когда нагрузка может представлять опасность для другого оборудования или персонала.
Системы прямого привода также обладают преимуществами по сравнению с традиционными системами с точки зрения обслуживания и срока службы. Во-первых, благодаря меньшему количеству быстроизнашивающихся компонентов потребность в смазке сведена к минимуму, а склад запасных частей оптимизирован. А устранение механических компонентов, которые могут подвергаться преждевременному износу или выходу из строя, означает, что системы с прямым приводом часто могут иметь более длительный срок службы, чем системы, использующие ремни, шарико-винтовые пары или другие механические компоненты трансмиссии.